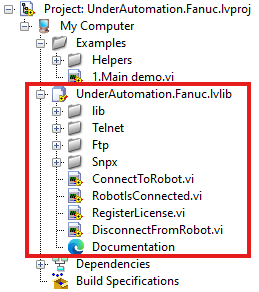
--- ## 📥 Download Example Applications Explore the **Fanuc SDK** with fully functional example applications for your LabVIEW version. 📌 **Download:** 📥 UnderAutomation.Fanuc.lvproj
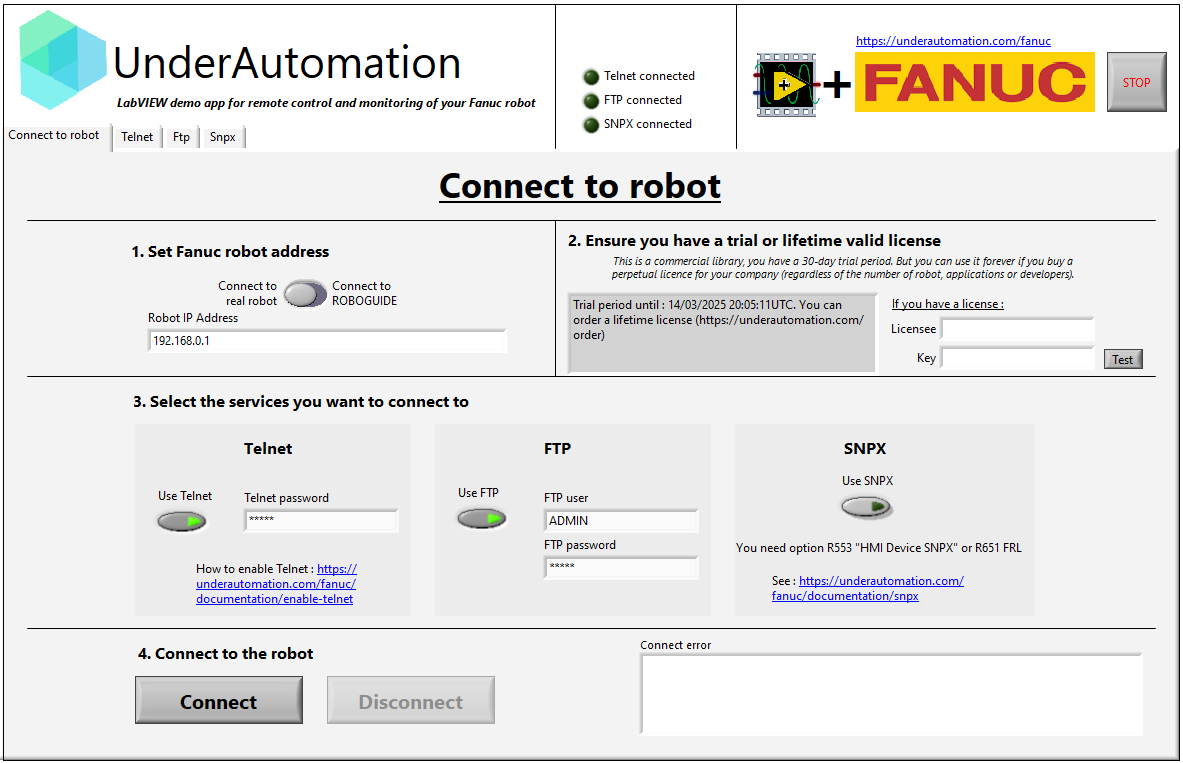
↗️ Enable TELNET on your robot
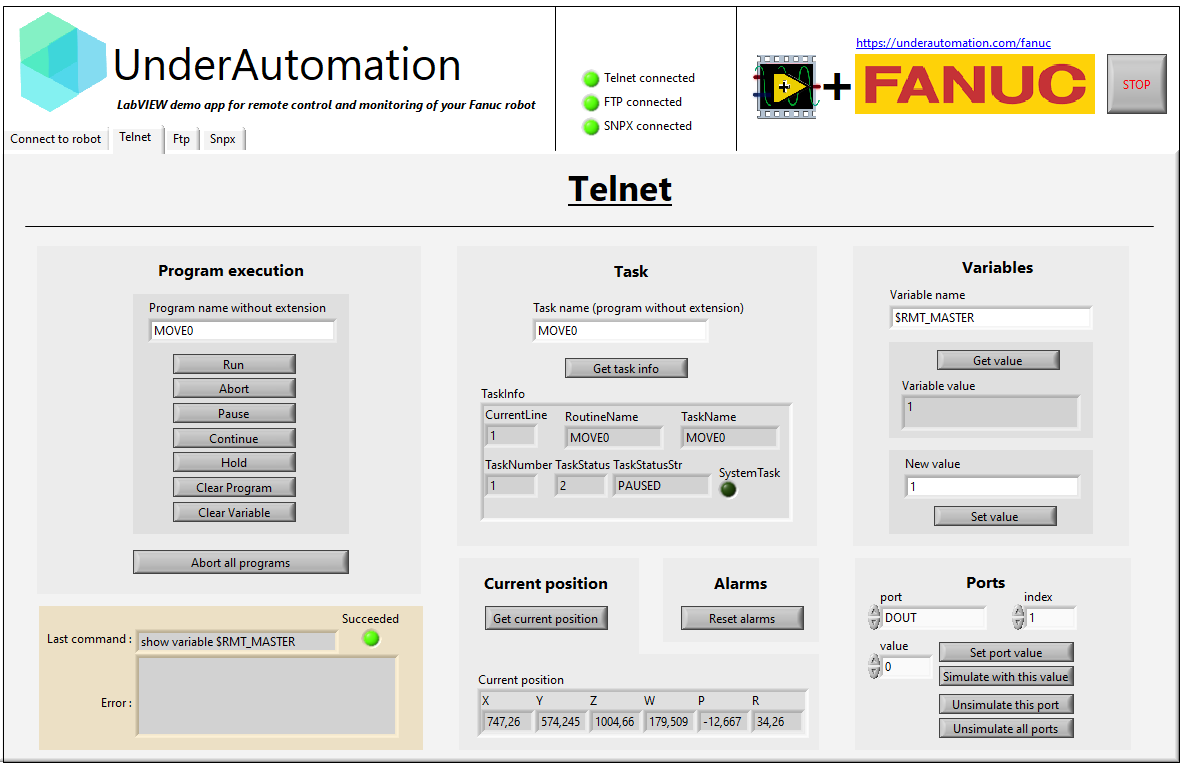
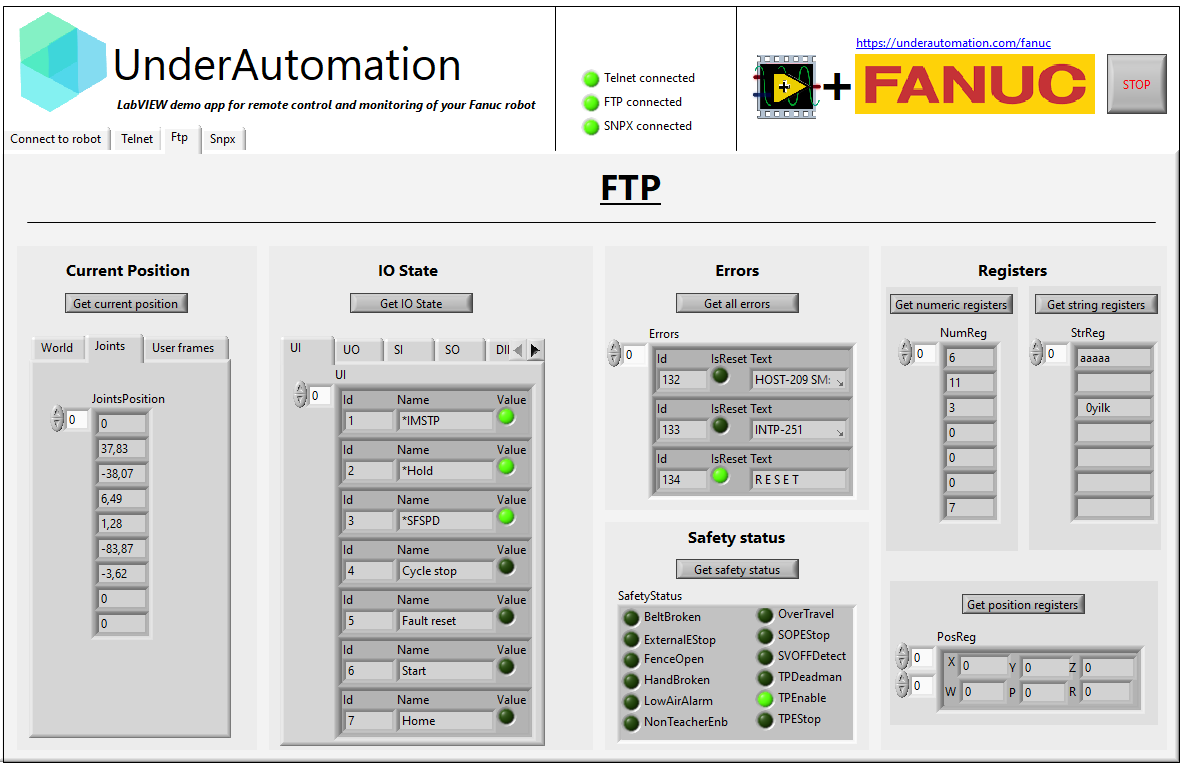
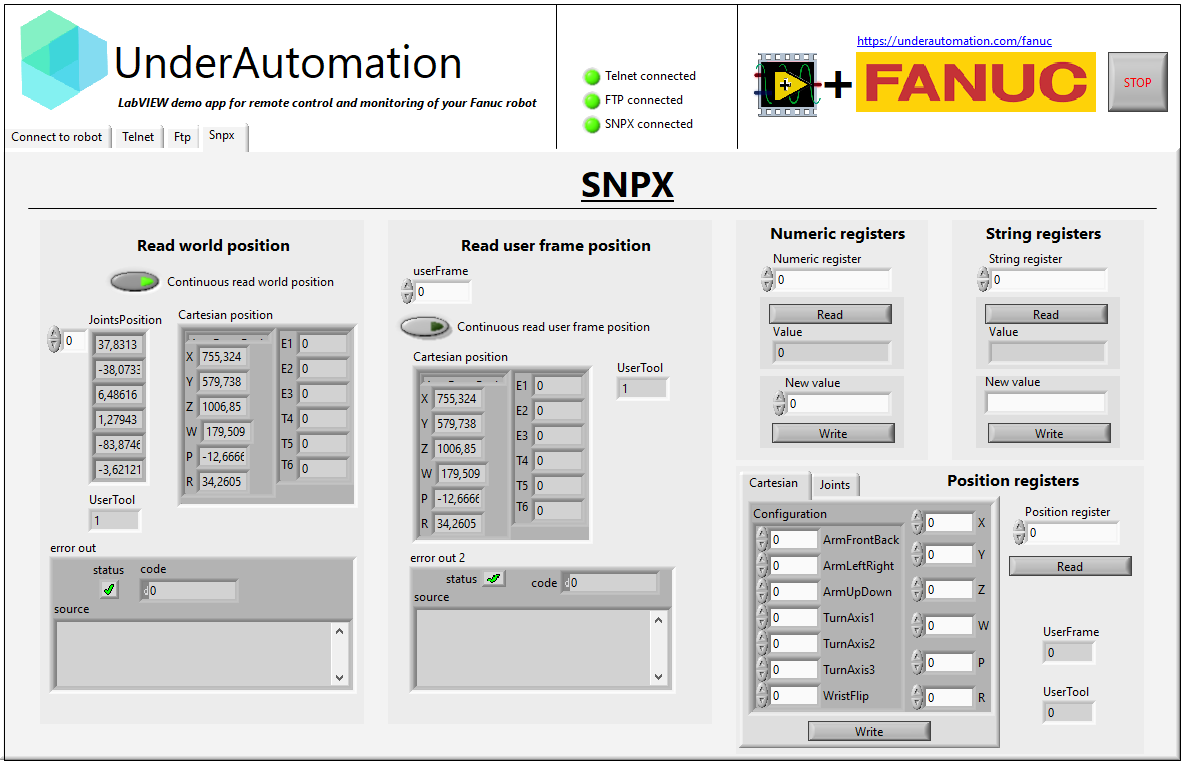
#### Run To run a program, you need the following conditions : - Set `$RMT_MASTER = 1` and `$REMOTE_CFG.$REMOTE_TYPE=1` (you can use `SetVariableValue.vi`) - Turn the TP switch to off - Reset alarms  #### Pause  #### Continue 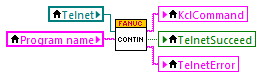 #### Hold 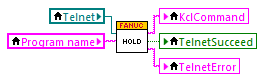 #### Abort 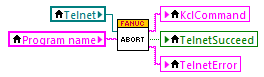 #### Abort all programs 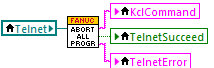 #### Clear program 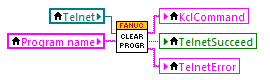 #### Get current position 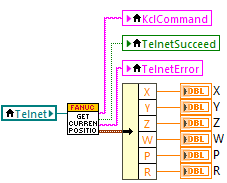 #### Get variable value 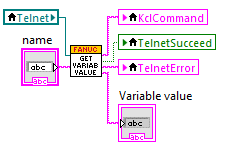 #### Set variable value 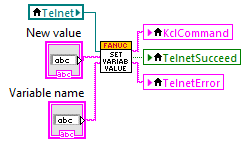 #### Clear variables 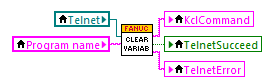 #### Reset alarms  #### Set port 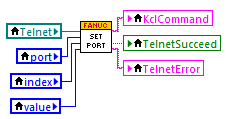 #### Simulate 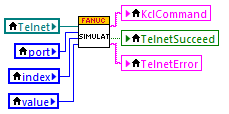 #### Unsimulate 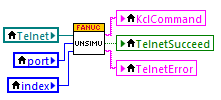 #### Unsimulate all  #### Telnet is connected  --- ### 📂 File & Variable Management via FTP Memory Access FTP (File Transfer Protocol) provides access to internal controller files, as well as fast parsing and decoding, including .va variable files and .dg diagnostic files. #### Get current position  #### Get IO states   #### Get safety status 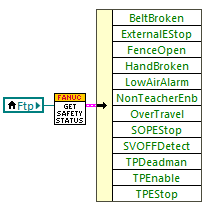 #### Get all errors list 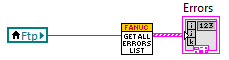 #### Get numeric registers 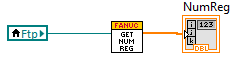 #### Get position registers 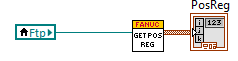 #### Get string registers 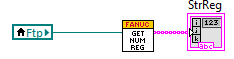 --- ### 🚀 High-Speed Data Exchange via SNPX (RobotIF) SNPX (Also known as RobotIF, Robot Interface, or SRTP) allows for quick reading and writing of data on the robot. TCP port Robot IF Server (by default 60008) should be accessible on your controller. To enable SNPX on your robot, you need one of the following option : - If R650 FRA params is selected (Option "FANUC America Corp." in "Advanced" tab of ROBOGUIDE "Worcell creation wizard - Step 7 Robot options"), R553 "HMI Device SNPX" is needed. - If R651 FRL Params is selected (Option "FANUC Ltd." in this "Advanced" tab), no option is needed. #### Get world position 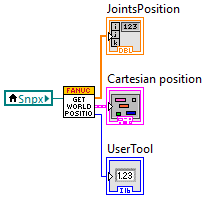 #### Get user frame position 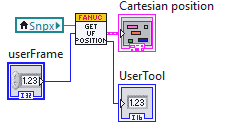 #### Read position register 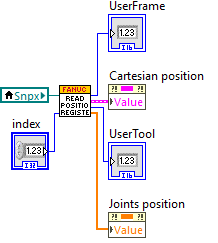 #### Write position register - Write cartesian position 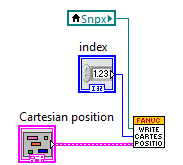 - Write joints position 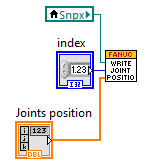 #### Read numeric register 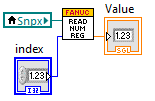 #### Write numeric register 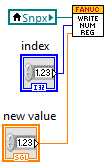 #### Read string register  #### Write string register  #### SNPX is connected  --- ### 📜✅ Register License You have 30 days free trial. For a long term use, you need to buy a license ([See pricing](https://underautomation.com/pricing)). Then, we will send you a license key and you will just have to specify it as input of `RegisterLicense.vi`. This VI must be called every time the application is started. It authorizes the call to `ConnectToRobot.vi` without license errors.