Inverse kinematics (IK) and forward kinematics (FK) let you move between joint space and Cartesian space. FK computes the tool p
ose from known joint angles, while IK finds joint angles for a desired pose. The kinematics utilities in the Fanuc SDK are **off
line helpers**: you can evaluate poses and joint solutions without connecting to a controller, making them perfect for simulatio
n, path validation, and pre-deployment checks.
## Why this matters for both industrial arms and cobots
The SDK ships with two analytical solvers and automatically chooses the right one for you:
- **OPW industrial arms**: Classical 6-axis Fanuc robots with an ortho-parallel base and spherical wrist, based on the paper `An Analytical Solution of the Inverse Kinematics Problem of Industrial Serial Manipulators with an Ortho-parallel Basis and a Spherical Wrist` by Mathias Brandstötter, Arthur Angerer, and Michael Hofbaur.
- **CRX collaborative arms**: Fanuc CRX cobots that have their own closed-form solver and optional dual solutions, based on paper `Geometric Approach for Inverse Kinematics of the FANUC CRX Collaborative Robot` by Manel Abbes and Gérard Poisson.
When you call `KinematicsUtils.InverseKinematics()`, it inspects `DhParameters.KinematicsCategory`:
- `KinematicsCategory.Opw` 👉 dispatches to `Opw.OpwKinematicsUtils.InverseKinematics` (industrial robots).
- `KinematicsCategory.Crx` 👉 dispatches to `Crx.CrxKinematicsUtils.InverseKinematics` (CRX cobots).
That means you can rely on a single entry point and let the SDK route the request appropriately. 🚦
## Typical workflows
### Run forward kinematics (FK)
**C# : KinematicsFK**
```csharp
using UnderAutomation.Fanuc.Common;
using UnderAutomation.Fanuc.Kinematics;
public class KinematicsFK
{
static void Main()
{
/**/
// Load robot geometry
var dh = DhParameters.FromArmKinematicModel(ArmKinematicModels.CRX10iA);
// Joint angles in degrees (Fanuc convention)
var jointsDeg = new JointsPosition { J1 = 0, J2 = -30, J3 = 45, J4 = 0, J5 = 60, J6 = 90 };
// Compute pose: returns XYZ + WPR
CartesianPosition pose = KinematicsUtils.ForwardKinematics(jointsDeg, dh);
/**/
}
}
```
**Python : KinematicsFK**
```python
from underautomation.fanuc.kinematics.kinematics_utils import KinematicsUtils
from underautomation.fanuc.kinematics.dh_parameters import DhParameters
from underautomation.fanuc.common.joints_position import JointsPosition
##
# Load robot geometry
dh = DhParameters.from_arm_kinematic_model("CRX10iA")
# Joint angles in degrees (Fanuc convention)
joints_deg = JointsPosition(j1=0, j2=-30, j3=45, j4=0, j5=60, j6=90)
# Compute pose: returns XYZ + WPR
pose = KinematicsUtils.forward_kinematics(joints_deg, dh)
##
```
### Solve inverse kinematics (IK) for an OPW robot
**C# : KinematicsIK**
```csharp
using UnderAutomation.Fanuc.Common;
using UnderAutomation.Fanuc.Kinematics;
using UnderAutomation.Fanuc.Kinematics.Crx;
public class KinematicsIK
{
static void Main()
{
/**/
// OPW industrial robot
var dh = DhParameters.FromArmKinematicModel(ArmKinematicModels.ARCMate120iD);
var target = new CartesianPosition { X = 800, Y = 0, Z = 450, W = 180, P = 0, R = 90 };
JointsPosition[] solutions = KinematicsUtils.InverseKinematics(target, dh);
// CRX cobot with dual solutions
var dhCrx = DhParameters.FromArmKinematicModel(ArmKinematicModels.CRX10iAL);
var targetCrx = new CartesianPosition { X = 400, Y = 250, Z = 650, W = 0, P = 90, R = 0 };
JointsPosition[] crxSolutions = CrxKinematicsUtils.InverseKinematics(
targetCrx, dhCrx,
includeDuals: true,
seedJoints: new double[] { 0, -20, 40, 0, 60, 0 }
);
/**/
}
}
```
**Python : KinematicsIK**
```python
from underautomation.fanuc.kinematics.kinematics_utils import KinematicsUtils
from underautomation.fanuc.kinematics.dh_parameters import DhParameters
from underautomation.fanuc.common.cartesian_position import CartesianPosition
##
# OPW industrial robot
dh = DhParameters.from_arm_kinematic_model("ARCMate120iD")
target = CartesianPosition(x=800, y=0, z=450, w=180, p=0, r=90)
solutions = KinematicsUtils.inverse_kinematics(target, dh)
# CRX cobot with dual solutions
dh_crx = DhParameters.from_arm_kinematic_model("CRX10iAL")
target_crx = CartesianPosition(x=400, y=250, z=650, w=0, p=90, r=0)
crx_solutions = KinematicsUtils.inverse_kinematics(
target_crx, dh_crx,
include_duals=True,
seed_joints=[0, -20, 40, 0, 60, 0]
)
##
```
### Solve inverse kinematics (IK) for a CRX cobot with dual solutions
### Build DH parameters from multiple sources
- **Built-in catalog**: `DhParameters.FromArmKinematicModel(ArmKinematicModels model)` gives you ready-to-use geometry for many
Fanuc arms and cobots.
- **ROBOGUIDE library**: `DhParameters.FromDefFile(path)` parses robot definitions in `ProgramData/FANUC/ROBOGUIDE/Robot Library
`.
- **Controller variables**: `DhParameters.FromSymotnFile` and `DhParameters.FromMrrGrp` convert live `$MRR_GRP` or `symotn.va` d
ata to reusable DH structures.
- **OPW data**: `DhParameters.FromOpwParameters` maps OPW parameters (meters) to Fanuc-style DH while keeping the kinematics cat
egory consistent.
## Practical tips ✨
- **Offline safety**: Because all solvers are offline, you can iterate quickly without touching a robot controller.
- **Pose normalization**: `OpwKinematicsUtils.InverseKinematics` normalizes angles to `(-180, 180]` to match Fanuc expectations.
- **Seeding CRX searches**: Pass `seedJoints` to `CrxKinematicsUtils.InverseKinematics` to bias solutions near a known posture.
- **Matrix helpers**: `KinematicsUtils.Mul` multiplies 2D matrices if you need to compose transforms manually.
Happy path-planning! 🛠️
## Online Forward and Inverse Kinematics
> **Pro tip**: You don't need DH parameters or offline solvers to perform kinematics when you have a live connection! The robot controller automatically computes both joint and Cartesian representations for every position register. Simply write a position in one form (joints or Cartesian) via SNPX, then read the same register back to get the other form. This lets the controller handle FK and IK for you-no geometry data required. 🎯
### Forward kinematics using SNPX position registers
Leverage the controller's built-in FK solver by writing joint angles and reading back the Cartesian pose:
**C# : KinematicsOnline**
```csharp
using UnderAutomation.Fanuc;
using UnderAutomation.Fanuc.Common;
public class KinematicsOnline
{
static void Main()
{
FanucRobot _robot = new FanucRobot();
_robot.Connect("192.168.0.1");
/**/
// Forward kinematics via SNPX: joints → Cartesian
JointsPosition jointsPosition = new JointsPosition(10, 12, 50, 20, 12, 16);
_robot.Snpx.PositionRegisters.Write(1, jointsPosition);
CartesianPosition cartesianPosition = _robot.Snpx.PositionRegisters.Read(1).CartesianPosition;
// Inverse kinematics via SNPX: Cartesian → joints
CartesianPosition targetPosition = new CartesianPosition() { X = 100, Y = 100, Z = 100 };
targetPosition.Configuration.WristFlip = WristFlip.Flip;
targetPosition.Configuration.ArmUpDown = ArmUpDown.Down;
targetPosition.Configuration.ArmLeftRight = ArmLeftRight.Left;
_robot.Snpx.PositionRegisters.Write(1, targetPosition);
JointsPosition resultJoints = _robot.Snpx.PositionRegisters.Read(1).JointsPosition;
/**/
}
}
```
**Python : KinematicsOnline**
```python
from underautomation.fanuc.fanuc_robot import FanucRobot
from underautomation.fanuc.common.joints_position import JointsPosition
from underautomation.fanuc.common.cartesian_position import CartesianPosition
robot = FanucRobot()
robot.connect("192.168.0.1")
##
# Forward kinematics via SNPX: joints → Cartesian
joints_position = JointsPosition(10, 12, 50, 20, 12, 16)
robot.snpx.position_registers.write(1, joints_position)
cartesian_position = robot.snpx.position_registers.read(1).cartesian_position
# Inverse kinematics via SNPX: Cartesian → joints
target_position = CartesianPosition(x=100, y=100, z=100)
target_position.configuration.wrist_flip = "Flip"
target_position.configuration.arm_up_down = "Down"
target_position.configuration.arm_left_right = "Left"
robot.snpx.position_registers.write(1, target_position)
result_joints = robot.snpx.position_registers.read(1).joints_position
##
```
### Inverse kinematics using SNPX position registers
Let the controller solve IK by writing a Cartesian pose and reading back joint angles. You will only have 1 solution since the cartesian position contains the configuration.
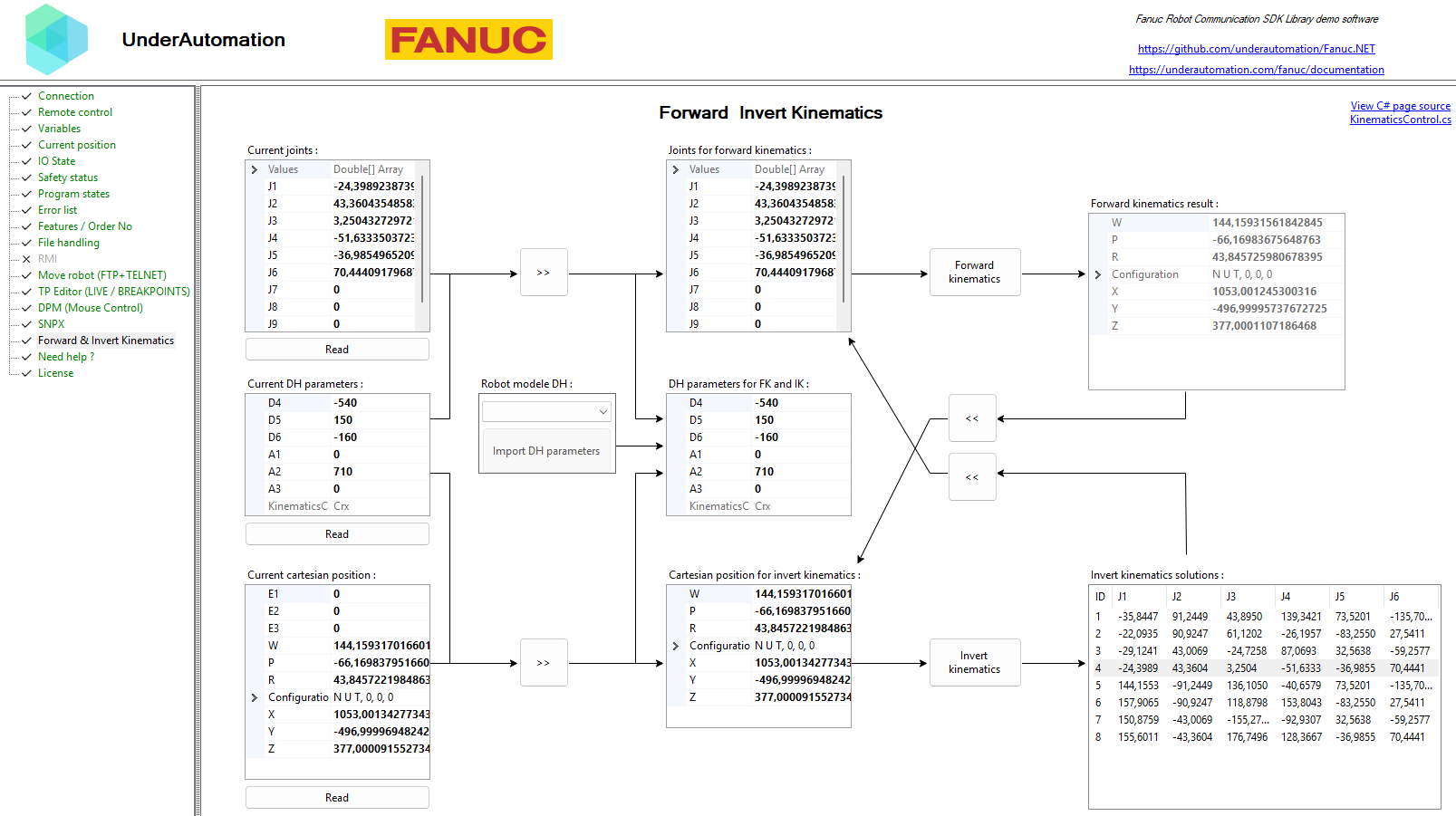
## Demonstration
Have a look at : https://fanuc-kinematics.underautomation.com
> This is a 3D playground that lets you experiment with forward and inverse kinematics for Fanuc robots and cobots
You can also take a look at the Winforms Desktop project source which implements all these features. I can be [downloaded here](/fanuc/download).
### Core types at a glance
**Members of Kinematics.KinematicsUtils**
```csharp
public static class KinematicsUtils {
// Compute FK for given joint angles (rad) and DH parameters
public static CartesianPosition ForwardKinematics(double[] jointAnglesRad, DhParameters dhParameters)
// Compute FK for given joint angles (deg) and DH parameters
public static CartesianPosition ForwardKinematics(JointsPosition jointAnglesDeg, DhParameters parameters)
// Compute all inverse kinematics solutions for a desired end effector pose.
public static JointsPosition[] InverseKinematics(CartesianPosition position, DhParameters parameters)
// Multiply two 4x4 homogeneous transformation matrices.
public static double[,] Mul(double[,] A, double[,] B)
}
```
**Members of Kinematics.DhParameters**
```csharp
public class DhParameters : IDhParameters {
// Initializes a new empty instance of .
public DhParameters()
// Initializes a new instance of with the specified values.
public DhParameters(double d4, double d5, double d6, double a1, double a2, double a3)
// Initializes a new instance of by copying from an existing .
public DhParameters(IDhParameters parameters)
// DH parameter A1 (mm).
public double A1 { get; set; }
// DH parameter A2 (mm).
public double A2 { get; set; }
// DH parameter A3 (mm).
public double A3 { get; set; }
// DH parameter D4 (mm).
public double D4 { get; set; }
// DH parameter D5 (mm).
public double D5 { get; set; }
// DH parameter D6 (mm).
public double D6 { get; set; }
public override bool Equals(object obj)
// Returns DH parameters from a known Arm Kinematic Model name. Returns null if not found in enum ArmKinematicModels.
public static DhParameters FromArmKinematicModel(string modelName)
// Returns DH parameters from a known Arm Kinematic Model.
public static DhParameters FromArmKinematicModel(ArmKinematicModels model)
// Loads DH parameters of each robots described in a ROBOGUIDE definition file (*.def). By default, this file is located in "C:\ProgramData\FANUC\ROBOGUIDE\Robot Library".
public static DhParameters[] FromDefFile(string path)
// Loads DH parameters of each robots described in a ROBOGUIDE definition file (*.def). By default, this file is located in "C:\ProgramData\FANUC\ROBOGUIDE\Robot Library".
public static DhParameters[] FromDefFile(XDocument doc)
// Loads DH parameters from parsed variable $MRR_GRP located in symotn.va.
public static DhParameters FromMrrGrp(MrrGrpVariableType mrrGrp)
// Creates DH parameters from OPW parameters (in meters)
// C1 and B are ignored because B is always 0 and C1 is not used in the DH representation.
public static DhParameters FromOpwParameters(double a1, double a2, double c2, double c3, double c4)
// Loads DH parameters of each group from a parsed symotn.va file.
public static DhParameters[] FromSymotnFile(SymotnFile file)
public override int GetHashCode()
// Gets the kinematics category determined from the DH parameter values.
public KinematicsCategory KinematicsCategory { get; }
// User-defined tag for associating additional data with this instance.
public object Tag
public override string ToString()
}
```
**Members of Kinematics.KinematicsCategory**
```csharp
public enum KinematicsCategory {
// CRX collaborative robot kinematics.
Crx = 1
// Invalid or unsupported kinematics configuration.
Invalid = 0
// OPW (ortho-parallel wrist) kinematics for standard industrial robots.
Opw = 2
}
```
**Members of Kinematics.IDhParameters**
```csharp
public interface IDhParameters {
// DH parameter A1 (mm).
double A1 { get; }
// DH parameter A2 (mm).
double A2 { get; }
// DH parameter A3 (mm).
double A3 { get; }
// DH parameter D4 (mm).
double D4 { get; }
// DH parameter D5 (mm).
double D5 { get; }
// DH parameter D6 (mm).
double D6 { get; }
}
```
**Members of Common.JointsPosition**
```csharp
public class JointsPosition {
// Default constructor
public JointsPosition()
// Constructor with 6 joint values in degrees
public JointsPosition(double j1Deg, double j2Deg, double j3Deg, double j4Deg, double j5Deg, double j6Deg)
// Constructor with 9 joint values in degrees
public JointsPosition(double j1Deg, double j2Deg, double j3Deg, double j4Deg, double j5Deg, double j6Deg, double j7Deg, double j8Deg, double j9Deg)
// Constructor from an array of joint values in degrees
public JointsPosition(double[] values)
public override bool Equals(object obj)
public override int GetHashCode()
// Check if joints position is near to expected joints position with a tolerance value
public static bool IsNear(JointsPosition j1, JointsPosition j2, double degreesTolerance)
// Gets or sets the joint value at the specified index
public double this[int i] { get; set; }
// Joint 1 in degrees
public double J1 { get; set; }
// Joint 2 in degrees
public double J2 { get; set; }
// Joint 3 in degrees
public double J3 { get; set; }
// Joint 4 in degrees
public double J4 { get; set; }
// Joint 5 in degrees
public double J5 { get; set; }
// Joint 6 in degrees
public double J6 { get; set; }
// Joint 7 in degrees
public double J7 { get; set; }
// Joint 8 in degrees
public double J8 { get; set; }
// Joint 9 in degrees
public double J9 { get; set; }
public override string ToString()
// Numeric values for each joints
public double[] Values { get; }
}
```
**Members of Common.CartesianPosition**
```csharp
public class CartesianPosition : XYZPosition {
// Default constructor
public CartesianPosition()
// Constructor with position and rotations
public CartesianPosition(double x, double y, double z, double w, double p, double r)
// Constructor with position, rotations and configuration
public CartesianPosition(double x, double y, double z, double w, double p, double r, Configuration configuration)
// Copy constructor
public CartesianPosition(CartesianPosition position)
// Constructor from an XYZ position with rotations
public CartesianPosition(XYZPosition position, double w, double p, double r)
// Position configuration
public Configuration Configuration { get; }
public override bool Equals(object obj)
// Create a CartesianPosition with unknow configuration from a homogeneous rotation and translation 4x4 matrix
public static CartesianPosition FromHomogeneousMatrix(double[,] R)
public override int GetHashCode()
// Check if two Cartesian positions are near each other within specified tolerances
public static bool IsNear(CartesianPosition a, CartesianPosition b, double mmTolerance, double degreesTolerance)
// Normalize an angle to the range ]-180, 180]
public static double NormalizeAngle(double angle)
// Normalize the W, P, R angles to the range ]-180, 180]
public static void NormalizeAngles(CartesianPosition pose)
// P rotation in degrees (Ry)
public double P { get; set; }
// R rotation in degrees (Rz)
public double R { get; set; }
// Convert position to a homogeneous rotation and translation 4x4 matrix
public double[,] ToHomogeneousMatrix()
public override string ToString()
// W rotation in degrees (Rx)
public double W { get; set; }
}
```