Enable Telnet on your robot
TELNET is natively available on ROBOGUIDE and all Fanuc robots without any option. Learn how to enable it step by step.
Telnet KCL allows you to send commands to a Fanuc robot, such as resetting alarms, writing variables, setting an IO, and more. This feature is natively available on all Fanuc robots without requiring any additional options.
To enable a TELNET connection on your real or simulated ROBOGUIDE robot, please follow the instructions below. On a real robot, the connection is established via TCP on port 23. In ROBOGUIDE, while this port is open, it only allows read-only access. Therefore, to enable full bidirectional communication via Telnet, you must follow the provided instructions to set up a dedicated alternative port.
This library allows you to send KCL (Karel Command Language) commands over the TELNET connection.
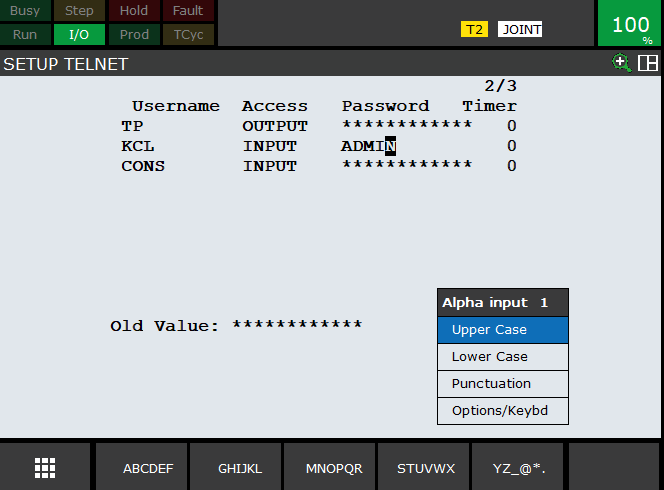
1. Set a TELNET password
Adding a password is mandatory to enable telnet control of the robot.
- Press
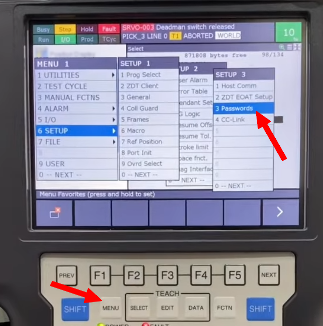
MENUon the robot's teach pendant.
- Select
SETUP/-- NEXT --/Host Comm
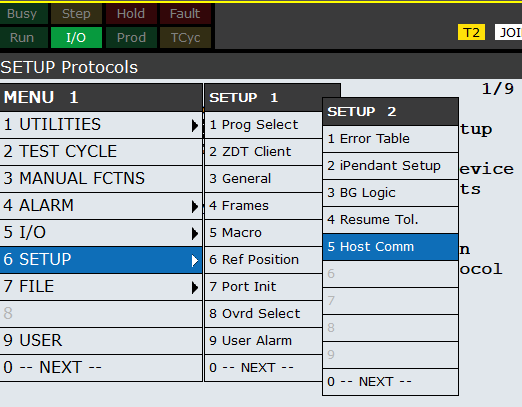
- Select
TELNETand pressDETAIL
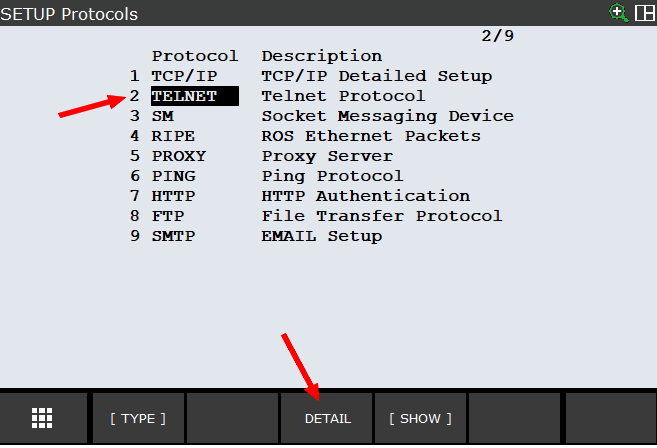
- Add a password to the KCL feature
-
Press
ENTERandPREVon the robot's teach pendant to validate this password. -
Cold start your robot
2. If you have option J541 (Password Protection)
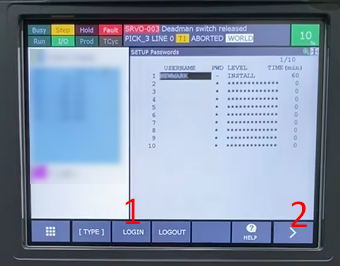
If the menu SETUP / Passwords exists on your robot, you have option "Password Protection" J541. You must then authorize the TELNET connection by modifying its security level.
- Press
MENUon the robot's teach pendant.
-
Select
SETUP/Passwords -
Login as
INSTALL
- Download this file : PASSWORD.xml,
On a real robot, transfer this file on a USB key and plug it into the pendant USB port.
On ROBOGUIDE, put this file into the UT1 directory.
<?xml version="1.0"?><PASSWORD><PWD level="0" const="1" access="1"/></PASSWORD>
-
Set import device to UT1 : press
MENUkey /File/File/[CONFIG]/Set Device/--next page--/USB on TP (UT1:) -
press
MENUkey /SETUP/Passwords/>at the bottom right of the pendant screen
- Select
CONFIGand importPASSWORD.xml
- Cold start your robot
3. Special configuration for ROBOGUIDE
If you are using ROBOGUIDE, you must also enable the KCL feature, as the default TELNET connection on port TCP 23 is read-only.
Currently, Telnet KCL simulation is not supported in ROBOGUIDE v10, only up to v9.
-
Start ROBOGUIDE, open a cell and show the teach pendant

-
press
MENUkey /SETUP/Port Init
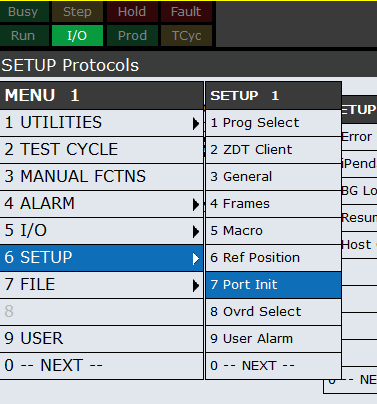
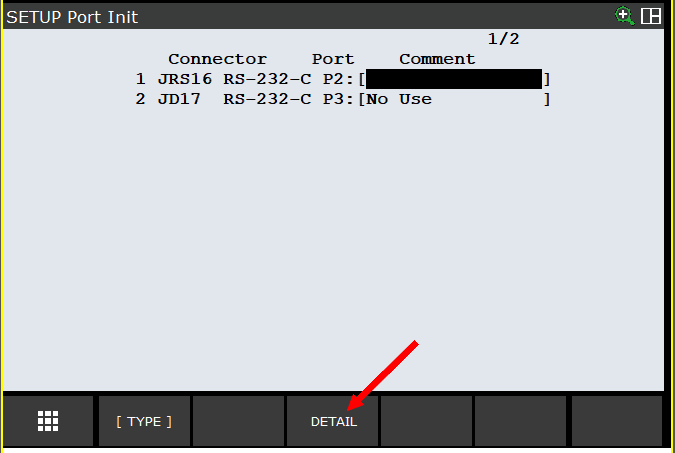
- Select
DETAILon first connector
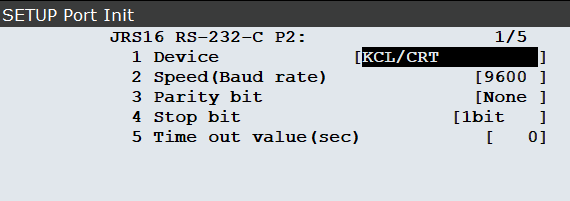
- Set
DevicetoKCL/CRT, then press buttonPREVon teach pendant
-
Cold start your robot
-
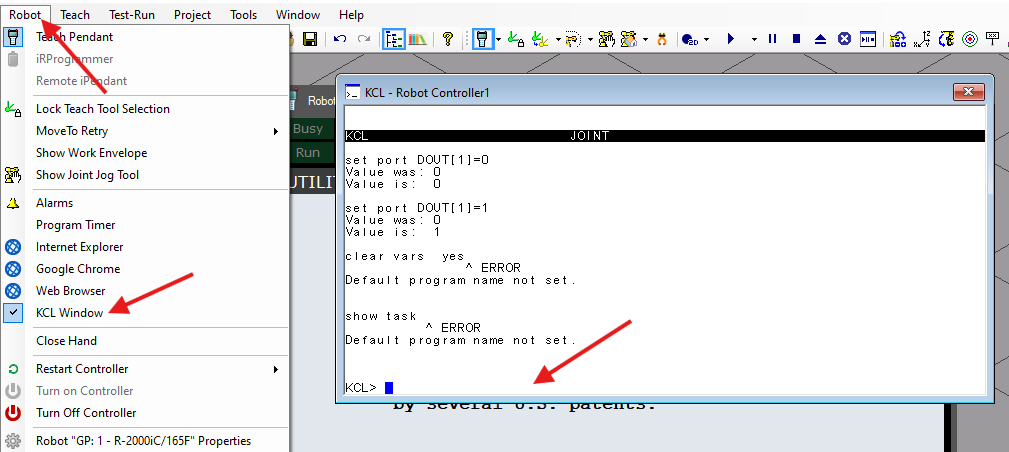
You can then see KCL commands in the KCL window :
Robotmenu /KCL Window