Yaskawa SDK
1/0
GitHub stars
500 (EUR) • 600 (USD)
$
600
평생 동안$
360
대학용 (40% 할인)Motoman Yaskawa Industrial Robot과 통신하는 .NET 응용 프로그램을 신속하게 만듭니다.
프로젝트에 적합한 라이선스를 선택하세요
.NET
Python
LabVIEW
Plug & Play
단 몇 분만에 로봇을 연결하세요. 설치할 라이센스 관리자도 없고 USB 키도 없습니다. 라이브러리만 참조하세요.
로봇에 설치할 플러그인이 없습니다
로봇 컨트롤러가 표준으로 제공 한 네트워크 프로토콜 사용.
Motoplus ROS
30일 평가판
30일간 무료, 약정 없음, 등록 필요 없음
한 번 지불하고 영원히 사용하십시오
로봇, 개발자 또는 재배포 된 소프트웨어에 관계없이 영구 라이센스, 구독 필요 없음
Yaskawa SDK 기능: HSES 프로토콜 & 모션 제어
로봇을 움직입니다
라이브러리를 사용하면 직교 및 공동 이동 명령을 전송할 수 있으며 현재 위치, 엔진 커플 및 위치 오류를 복구 할 수 있습니다.
// Get robot positionRobotPositionCartesianData position = robot.HighSpeedEServer.GetRobotCartesianPosition();// Move cartesianrobot.HighSpeedEServer.MoveCartesian(x: 1000,y: 10,z: 0,rx: 0,ry: 0,rz: 0,PositionCommandClassification.Cartesian_MM_S,speed: 10,PositionCommandOperationCoordinate.Robot);// Move jointsrobot.HighSpeedEServer.MoveJoints(new int[] { 1000, 0, 0, 0, 0, 0 }, PositionCommandClassification.LinkPercent, 10);
로봇 프로그램을 실행하십시오
SDK를 사용하면 컨트롤러에 프로그램을 보내고 원격으로 시작할 수 있습니다.
그런 다음 실행의 진행과 경보 상태를 따르는 것이 가능합니다.
// Send Servo ONrobot.HighSpeedEServer.ServoCommand(OnOffCommandType.Servo, true);// Upload program on robotrobot.HighSpeedEServer.LoadFile("PROGRAM.JBI", File.ReadAllText("PROGRAM.JBI"));// Select job and start itrobot.HighSpeedEServer.SelectJob("PROGRAM", 1);robot.HighSpeedEServer.StartJob();// Get robot status (Play, Error, Alarming, etc.)RobotStatusData statusData = robot.HighSpeedEServer.GetStatusInformation();
데이터 읽기 및 쓰기
응용 프로그램은 로봇의 모든 유형의 레지스터를 읽고 쓸 수 있습니다 (IO, 위치 변수, 바이트 변수, ...)
// Read IO 1 to 100var ioData = robot.HighSpeedEServer.ReadIO(firstIndex: 1, count: 100);// Write IO 2701 to 2704 (Network input signal)robot.HighSpeedEServer.WriteIO(2701, new byte[] { 0x01, 0x00, 0xFF, 0x00 });// Read position registers P[1] to P[4]var positionData = robot.HighSpeedEServer.ReadPositionVariable(1, 4);
파일 처리
라이브러리를 사용하면 컨트롤러의 파일을 할 수 있습니다 : 다운로드, 전송, 삭제, 목록
// List all files with extension .JBI (programs)string[] files = robot.HighSpeedEServer.GetFileList("*.JBI").Files;// Upload file to robotrobot.HighSpeedEServer.LoadFile("PROGRAM", fileContent, onLoadFileProgress);// Download file from robotrobot.HighSpeedEServer.GetFile("PROGRAM", onGetFileProgress);// Delete filerobot.HighSpeedEServer.DeleteFile("PROGRAM.JBI");
문서를 찾아보십시오
다운로드 및 테스트


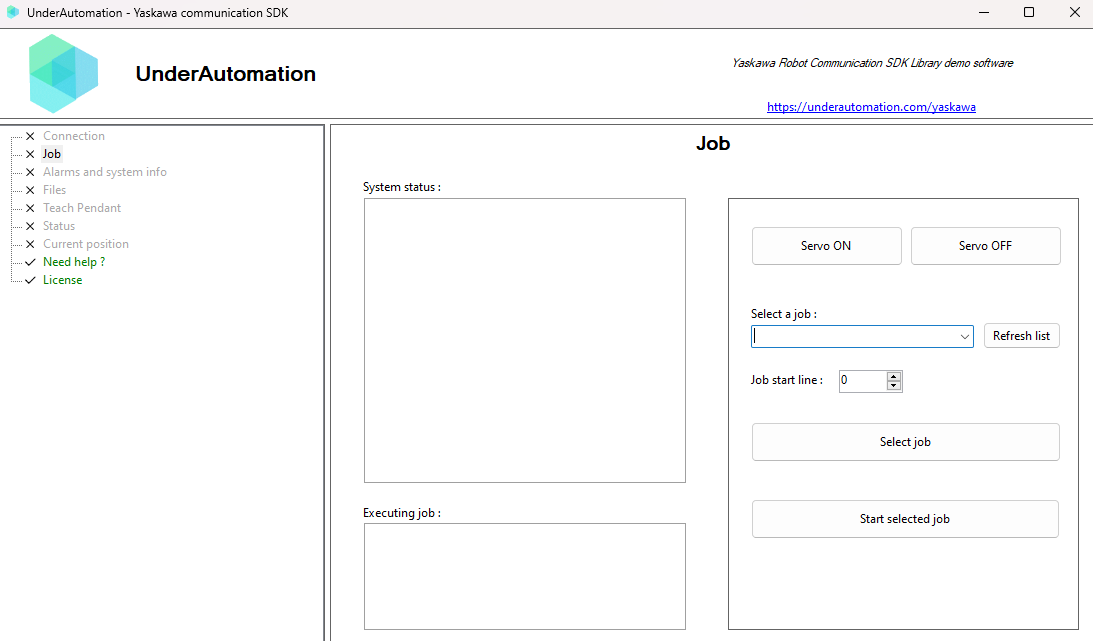
Windows 응용 프로그램 예제
간단한 인터페이스로 SDK의 모든 기능을 테스트 할 수 있습니다. 이 예제는 .NET 8을 사용하여 "자체 포함 된"및 "단일 파일"으로 편집되어 있습니다. 응용 프로그램은 설치없이 휴대용입니다.
다운로드하면 일반적인 사용 조건을 수락합니다.
일반 이용약관 보기
일반 이용약관 보기
견적 및 주문을 요청하십시오
물가
라이브러리는 무료로 다운로드 할 수 있으며 30 일 동안 테스트 할 수 있습니다. 이 기간이 지나면 시험 기간을 연장하거나 가장 적합한 라이센스를 구입하도록 요청할 수 있습니다 : 사이트 (가로 된 바이너리 전용) 또는 소스 (소스 코드). 구매 후 1 년의 유지 보수 기간이있어 지원 및 업데이트 가능성에 우선적으로 액세스 할 수 있습니다. 사용할 라이센스를 구매하면 로봇 브랜드와 연결되어 있으며 고객에게 재분배하는 로봇, 개발자 또는 소프트웨어의 수에 관계없이 반복 비용없이 영원히 사용할 수 있습니다. 유통 업체이고 고객에게 당사 제품 중 하나를 제공하려면 특별 조건과 가격에 대해 문의하십시오.
가장 인기있는
표준 사이트 라이센스
500€ (EUR) • $600 (USD)
$
600
평생 동안$
360
대학용 (40% 할인)산업 환경에 맞게 설계되어 평생 모든 기능에 대한 액세스를 제공합니다.
1년 유지 관리 포함(업데이트 액세스)
지원이 우선시되지 않고 유지 관리 기간이 1년이라는 점을 제외하면 Pro 라이선스와 조건이 동일합니다.
내부 소스가 없습니다.
난독화된 DLL만 제공됩니다.
화상회의 지원은 없습니다(이메일을 통해서만 가능).
프로 라이선스
750€ (EUR) • $900 (USD)
$
900
$1560
$
540
대학용 (40% 할인)우선적인 지원과 장기적인 유지 관리가 필요한 중요한 생산 환경에 적합합니다.
3년 유지 관리 포함(업데이트 액세스), 해당 기간 동안 갱신 주문 없음(서류 작업 없음)
완전하고 영구적 인 SDK : 반복 구독이 필요하지 않으며 라이센스는 영원히 귀하의 것이며 로봇 브랜드의 모든 프로그래밍 언어로 작동합니다.
명시된 우편 주소에서 라이센스를 보유한 조직에서만 사용할 수 있습니다.
모든 팀 개발자는 개발 기계의 수에 관계없이 동일한 라이센스를 공유합니다.
SDK를 사용하여 개발 된 모든 응용 프로그램은 연결 로봇 수에 관계없이 추가 비용없이 무제한 수의 고객에게 전달할 수 있습니다.
라이센스는 기능을 잠금 해제하는 코드에서 호출하는 일종의 암호입니다.
설치할 추가 소프트웨어가 없습니다.
USB 키가 없습니다.
우선 지원(평균 24시간 미만)
원격 지원(이메일 및 최대 2시간 화상 회의)
내부 소스가 없습니다.
난독화된 DLL만 제공됩니다.
언제든지 Source로 업그레이드(차액 지불)
소스 코드 라이선스
1500€ (EUR) • $1800 (USD)
$
1800
평생 동안$
1080
대학용 (40% 할인)완전한 기술 주권, 심층적인 맞춤화, 완전한 독립성을 보장합니다.
Pro 라이센스와 동일한 조건
C#로 라이브러리의 완전한 내부 코드
수년에 걸쳐 개발된 수천 줄의 코드가 포함된 Visual Studio 솔루션
이 소스 코드를 수정하여 일반 이용 약관에 정의된 제한 내에서 애플리케이션에서 사용할 수 있습니다.
전체 소스 코드 접근과 포함된 컨텍스트 파일(AGENTS.md) 덕분에 AI 코딩 에이전트(Claude, Copilot, Cursor, Codex 등)와 최적으로 연동되어 LLM이 SDK 내부 구조를 정확히 파악할 수 있습니다