Yaskawa SDK
500 (EUR) • 600 (USD)
$
600
lifetime$
360
for universities (40% discount)Quickly create .NET applications that communicate with your Motoman Yaskawa industrial robot.
.NET
Python
LabVIEW
Plug & Play
Connect your robot in just a few minutes. No license manager to install, no USB key. Only reference the library.
No plugins to install on the robot
Use of network protocols provided as standard by the robot controller.
Motoplus ROS
30-day trial
Try it free for 30 days, no commitment, no registration required
Pay once, use forever
Perpetual license, no subscription required, regardless of the number of robots, developers, or redistributed software
Yaskawa SDK Features: HSES Protocol & Motion Control
Move the robot
// Get robot positionRobotPositionCartesianData position = robot.HighSpeedEServer.GetRobotCartesianPosition();// Move cartesianrobot.HighSpeedEServer.MoveCartesian(x: 1000,y: 10,z: 0,rx: 0,ry: 0,rz: 0,PositionCommandClassification.Cartesian_MM_S,speed: 10,PositionCommandOperationCoordinate.Robot);// Move jointsrobot.HighSpeedEServer.MoveJoints(new int[] { 1000, 0, 0, 0, 0, 0 }, PositionCommandClassification.LinkPercent, 10);
Run robot programs
// Send Servo ONrobot.HighSpeedEServer.ServoCommand(OnOffCommandType.Servo, true);// Upload program on robotrobot.HighSpeedEServer.LoadFile("PROGRAM.JBI", File.ReadAllText("PROGRAM.JBI"));// Select job and start itrobot.HighSpeedEServer.SelectJob("PROGRAM", 1);robot.HighSpeedEServer.StartJob();// Get robot status (Play, Error, Alarming, etc.)RobotStatusData statusData = robot.HighSpeedEServer.GetStatusInformation();
Data reading and writing
// Read IO 1 to 100var ioData = robot.HighSpeedEServer.ReadIO(firstIndex: 1, count: 100);// Write IO 2701 to 2704 (Network input signal)robot.HighSpeedEServer.WriteIO(2701, new byte[] { 0x01, 0x00, 0xFF, 0x00 });// Read position registers P[1] to P[4]var positionData = robot.HighSpeedEServer.ReadPositionVariable(1, 4);
File handling
// List all files with extension .JBI (programs)string[] files = robot.HighSpeedEServer.GetFileList("*.JBI").Files;// Upload file to robotrobot.HighSpeedEServer.LoadFile("PROGRAM", fileContent, onLoadFileProgress);// Download file from robotrobot.HighSpeedEServer.GetFile("PROGRAM", onGetFileProgress);// Delete filerobot.HighSpeedEServer.DeleteFile("PROGRAM.JBI");
Browse the documentation
Download and test


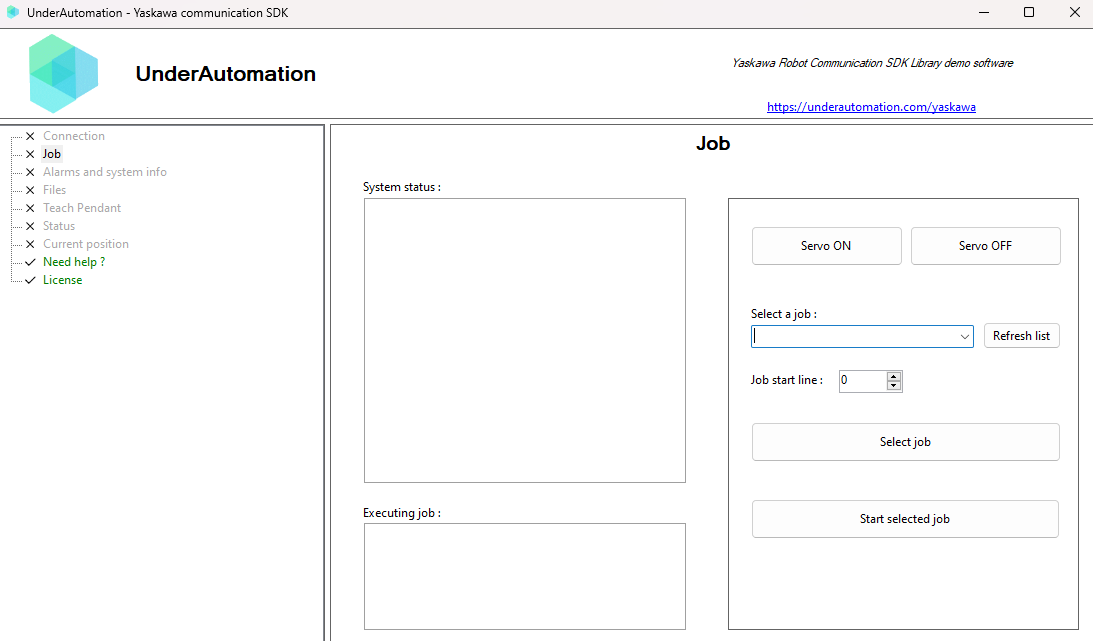
Allows you to test all the features of the SDK with a simple interface. The example is compiled in "self contained" and "single file" with .NET 8. The application is portable without installation.
See terms and conditions
Request a quote and order
Pricing
Libraries can be downloaded for free and can be tested for 30 days. After this period, you can ask us to extend the trial period, or buy the license that suits you best: standard, pro or source. After purchasing, you have a maintenance period, giving you access to the support and the possibility of updating. When you buy a license to use, it is linked to a robot brand, you can use it forever, without recurring fee, regardless of the number of robot, developer or software that you redistribute to your customers. If you are a distributor and wish to offer your customers one of our products, please contact us to discuss special conditions and prices.