Yaskawa SDK
1/0
Plug & Play
只需几分钟即可连接您的机器人。无需安装许可证管理器, 无需 USB 密钥。仅参考图书馆。
没有在机器人上安装的插件
使用机器人控制器作为标准提供的网络协议。
Motoplus ROS
30 天试用
免费试用 30 天, 无承诺, 无需注册
付一次, 永远使用
永久许可, 无需订阅, 无论机器人, 开发人员的数量是多少
Yaskawa SDK 功能: HSES 协议和运动控制
移动机器人
该库允许发送笛卡尔和联合运动命令, 并允许您恢复当前位置, 几对引擎和定位误差。
// Get robot positionRobotPositionCartesianData position = robot.HighSpeedEServer.GetRobotCartesianPosition();// Move cartesianrobot.HighSpeedEServer.MoveCartesian(x: 1000,y: 10,z: 0,rx: 0,ry: 0,rz: 0,PositionCommandClassification.Cartesian_MM_S,speed: 10,PositionCommandOperationCoordinate.Robot);// Move jointsrobot.HighSpeedEServer.MoveJoints(new int[] { 1000, 0, 0, 0, 0, 0 }, PositionCommandClassification.LinkPercent, 10);
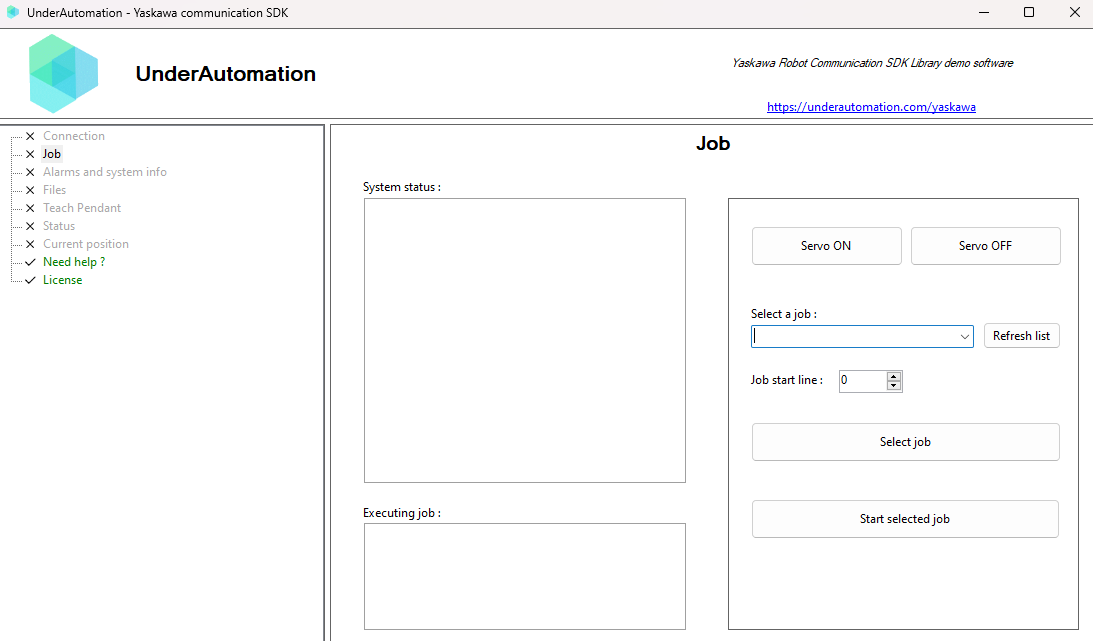
运行机器人程序
SDK允许您将程序发送到控制器并远程启动。
然后可以遵循执行的进度以及警报状态。
// Send Servo ONrobot.HighSpeedEServer.ServoCommand(OnOffCommandType.Servo, true);// Upload program on robotrobot.HighSpeedEServer.LoadFile("PROGRAM.JBI", File.ReadAllText("PROGRAM.JBI"));// Select job and start itrobot.HighSpeedEServer.SelectJob("PROGRAM", 1);robot.HighSpeedEServer.StartJob();// Get robot status (Play, Error, Alarming, etc.)RobotStatusData statusData = robot.HighSpeedEServer.GetStatusInformation();
数据阅读和写作
您的应用程序可以在机器人中读取所有类型的寄存器 (io, 位置变量, 字节变量, ...)
// Read IO 1 to 100var ioData = robot.HighSpeedEServer.ReadIO(firstIndex: 1, count: 100);// Write IO 2701 to 2704 (Network input signal)robot.HighSpeedEServer.WriteIO(2701, new byte[] { 0x01, 0x00, 0xFF, 0x00 });// Read position registers P[1] to P[4]var positionData = robot.HighSpeedEServer.ReadPositionVariable(1, 4);
文件处理
库允许您可以在控制器上的文件: 下载, 发送, 删除, 列表
// List all files with extension .JBI (programs)string[] files = robot.HighSpeedEServer.GetFileList("*.JBI").Files;// Upload file to robotrobot.HighSpeedEServer.LoadFile("PROGRAM", fileContent, onLoadFileProgress);// Download file from robotrobot.HighSpeedEServer.GetFile("PROGRAM", onGetFileProgress);// Delete filerobot.HighSpeedEServer.DeleteFile("PROGRAM.JBI");
浏览文档
下载和测试


Windows应用程序示例
允许您使用简单的接口测试SDK的所有功能。 该示例用.NET 8中的“自我包含”和“单个文件”编译。该应用程序在不安装的情况下可移植。
通过下载, 您接受使用的一般条件:
见条款和条件
见条款和条件
请求报价和订单
价格
可以免费下载库, 可以进行30天的测试。 在此期间之后, 您可以要求我们延长试用期, 或购买最适合您的许可证: 站点 (仅二进制二进制) 或源代码 (源代码) 。 购买后, 您有一个一年的维护期, 使您优先访问支持和更新的可能性。 当您购买使用许可证时, 它会链接到机器人品牌, 无论您将其重新分配给客户的机器人, 开发人员或软件的数量如何, 都可以永远使用, 而无需重复费用。 如果您是分销商, 并希望为您的客户提供我们的产品之一, 请与我们联系以讨论特殊条件和价格。
最受欢迎
标准站点许可证
500€ (EUR) • $600 (USD)
$
600
为了一生$
360
大学 (40% 折扣)专为工业环境而设计, 提供终身全功能访问。
包括 1 年维护 (获取更新)
与 Pro 许可证的条件相同, 但支持不优先且维护期为 1 年。
没有内部来源;
仅提供混淆的 DLL。
无法通过视频会议提供帮助 (仅通过电子邮件) 。
专业许可
750€ (EUR) • $900 (USD)
$
900
$1560
$
540
大学 (40% 折扣)适用于需要优先支持和长期维护的关键生产环境。
包括 3 年维护 (获取更新) , 在此期限内没有续订订单 (零文书工作)
完整和永久的SDK: 无需重复订阅, 许可证是您的永远您的, 并且可以使用机器人品牌的所有编程语言。
仅在指定的邮政地址上持有许可证的组织才能使用。
不管开发机器的数量多少, 所有团队开发人员都将共享相同的许可证。
使用SDK开发的任何应用程序都可以将无限数量的客户提供, 而不管要连接的机器人数量如何。
该许可证是一种密码, 可以在解锁功能的代码中调用。
没有其他软件要安装。
没有USB密钥。
优先支持 (平均<24小时)
远程协助 (电子邮件和长达 2 小时的视频会议)
没有内部来源;
仅提供混淆的 DLL。
随时升级到源 (支付差价)
源代码许可
1500€ (EUR) • $1800 (USD)
$
1800
为了一生$
1080
大学 (40% 折扣)实现完全的技术主权、深度定制和完全独立。
与专业许可证的条件相同
C# 语言库的完整内部代码
Visual Studio 解决方案包含数年开发的数千行代码
您可以在一般使用条款中定义的限制内修改此源代码并在您的应用程序中使用它
与AI编程助手(Claude、Copilot、Cursor、Codex等)完美协作,得益于完整源代码访问权限和随附的上下文文件(AGENTS.md),为LLM提供SDK内部结构的精确知识