Yaskawa SDK
500 (EUR) • 600 (USD)
$
600
一生$
360
大学向け (40% 割引)Motoman Yaskawa Industrial Robotと通信する.NETアプリケーションをすばやく作成します。
.NET
Python
LabVIEW
Plug & Play
わずか数分でロボットを接続できます。ライセンス マネージャーをインストールしたり、USB キーをインストールしたりする必要はありません。ライブラリのみを参照してください。
ロボットにインストールするプラグインはありません
ロボットコントローラーによって標準として提供されるネットワークプロトコルの使用。
Motoplus ROS
30日間のトライアル
30日間無料で試してみてください、コミットメントなし、登録は必要ありません
一度支払い、永遠に使用してください
ロボット、開発者、または再配布されたソフトウェアの数に関係なく、永続的なライセンス、サブスクリプションは必要ありません
安川SDK機能: HSESプロトコル&モーション制御
ロボットを移動します
// Get robot positionRobotPositionCartesianData position = robot.HighSpeedEServer.GetRobotCartesianPosition();// Move cartesianrobot.HighSpeedEServer.MoveCartesian(x: 1000,y: 10,z: 0,rx: 0,ry: 0,rz: 0,PositionCommandClassification.Cartesian_MM_S,speed: 10,PositionCommandOperationCoordinate.Robot);// Move jointsrobot.HighSpeedEServer.MoveJoints(new int[] { 1000, 0, 0, 0, 0, 0 }, PositionCommandClassification.LinkPercent, 10);
ロボットプログラムを実行します
// Send Servo ONrobot.HighSpeedEServer.ServoCommand(OnOffCommandType.Servo, true);// Upload program on robotrobot.HighSpeedEServer.LoadFile("PROGRAM.JBI", File.ReadAllText("PROGRAM.JBI"));// Select job and start itrobot.HighSpeedEServer.SelectJob("PROGRAM", 1);robot.HighSpeedEServer.StartJob();// Get robot status (Play, Error, Alarming, etc.)RobotStatusData statusData = robot.HighSpeedEServer.GetStatusInformation();
データの読み取りと書き込み
// Read IO 1 to 100var ioData = robot.HighSpeedEServer.ReadIO(firstIndex: 1, count: 100);// Write IO 2701 to 2704 (Network input signal)robot.HighSpeedEServer.WriteIO(2701, new byte[] { 0x01, 0x00, 0xFF, 0x00 });// Read position registers P[1] to P[4]var positionData = robot.HighSpeedEServer.ReadPositionVariable(1, 4);
ファイル処理
// List all files with extension .JBI (programs)string[] files = robot.HighSpeedEServer.GetFileList("*.JBI").Files;// Upload file to robotrobot.HighSpeedEServer.LoadFile("PROGRAM", fileContent, onLoadFileProgress);// Download file from robotrobot.HighSpeedEServer.GetFile("PROGRAM", onGetFileProgress);// Delete filerobot.HighSpeedEServer.DeleteFile("PROGRAM.JBI");
ドキュメントを閲覧します
ダウンロードとテスト


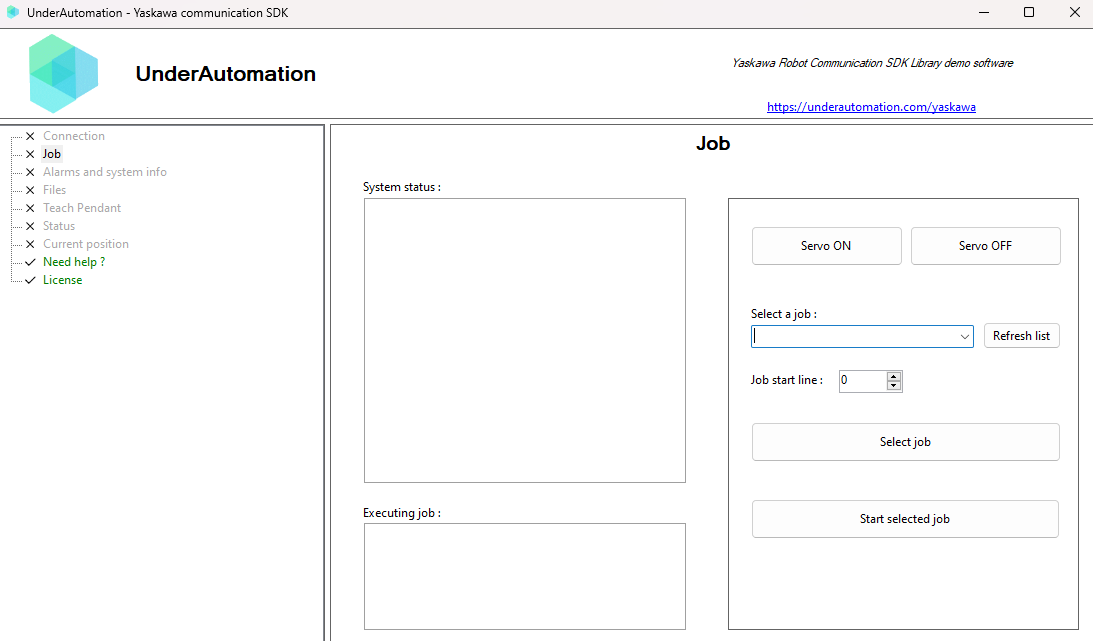
SDKのすべての機能を簡単なインターフェイスでテストできます。 この例は、.NET 8を使用して「Self Conted」および「Single File」でコンパイルされています。アプリケーションはインストールなしでポータブルです。
利用規約を見る
見積もりと注文をリクエストしてください
価格
ライブラリは無料でダウンロードでき、30日間テストできます。 この期間の後、トライアル期間を延長するように頼むか、自分に最適なライセンスを購入することができます: サイト (不明瞭なバイナリのみ) またはソース (ソースコード) 。 購入後、1年のメンテナンス期間があり、サポートへの優先アクセスと更新の可能性が得られます。 使用するライセンスを購入する場合、ロボットブランドにリンクされているため、顧客に再配布するロボット、開発者、またはソフトウェアの数に関係なく、繰り返し料金を払うことなく永久に使用できます。 あなたがディストリビューターであり、お客様に当社の製品のいずれかを提供したい場合は、特別な条件と価格について話し合うためにお問い合わせください。