Fanuc SDK
1100 (EUR) • 1300 (USD)
$
1300
一生$
780
大学向け (40% 割引)Fanuc Industrial Robotと通信する.NETアプリケーションをすばやく作成します。
.NET
Python
LabVIEW
Plug & Play
わずか数分でロボットを接続できます。ライセンス マネージャーをインストールしたり、USB キーをインストールしたりする必要はありません。ライブラリのみを参照してください。
ロボットにインストールするプラグインはありません
ロボットコントローラーによって標準として提供されるネットワークプロトコルの使用。
Karel ROS
30日間のトライアル
30日間無料で試してみてください、コミットメントなし、登録は必要ありません
一度支払い、永遠に使用してください
ロボット、開発者、または再配布されたソフトウェアの数に関係なく、永続的なライセンス、サブスクリプションは必要ありません
お客様の成功事例
当社のお客様が UnderAutomation ソリューションを産業プロジェクトにどのように統合しているかをご覧ください。




Fanuc SDK機能: Telnet、SNPX、FTP&キネマティクス
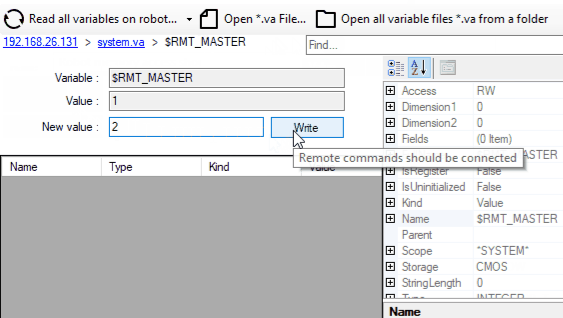
リモートコマンド
// Reset alarmsrobot.Telnet.Reset();// Run a programrobot.Telnet.Run("MyProgram");robot.Telnet.Pause("MyProgram");robot.Telnet.Hold("MyProgram");robot.Telnet.Continue("MyProgram");robot.Telnet.Abort("MyProgram", force: true);// Set a variablerobot.Telnet.SetVariable("$RMT_MASTER", 1);// Set an output port (example: DOUT port 2 = 0)robot.Telnet.SetPort(KCLPorts.DOUT, 2, 0);// Simulate an input port (example: DIN port 3 = 1)robot.Telnet.Simulate(KCLPorts.DIN, 3, 1);robot.Telnet.Unsimulate(KCLPorts.DIN, 3);
高速データの読み取りと書き込み
// Read a registerPosition posReg1 = robot.Snpx.PositionRegisters.Read(1);float numReg5 = robot.Snpx.NumericRegisters.Read(5);string strReg10 = robot.Snpx.StringRegisters.Read(10);// Write a registerposReg1.CartesianPosition.X = 100;robot.Snpx.PositionRegisters.Write(1, posReg1);robot.Snpx.NumericRegisters.Write(2, 123.45f);robot.Snpx.StringRegisters.Write(3, "Hello, world!");// Read a variableint rmtMaster = robot.Snpx.IntegerSystemVariables.Read("$RMT_MASTER");string lastAlm = robot.Snpx.StringSystemVariables.Read("$ALM_IF.$LAST_ALM");Position cellFloor = robot.Snpx.PositionSystemVariables.Read("$CELL_FLOOR");// Write a system variablerobot.Snpx.IntegerSystemVariables.Write("$RMT_MASTER", 1);robot.Snpx.StringSystemVariables.Write("$ALM_IF.$LAST_ALM", "No alarms");robot.Snpx.PositionSystemVariables.Write("$CELL_FLOOR", cellFloor);// Write a Karel program variablerobot.Snpx.IntegerSystemVariables.Write("$[KarelProgram]KarelVariable", 1);// Read and Write I/O (SDI,SDO,RDI,RDO,UI,UO,SI,SO,WI,WO,WSI,PMC_K,PMC_R)robot.Snpx.RDO.Write(1, true);ushort ai5 = robot.Snpx.AI.Read(5);// Read and Write analogs (AI,AO,GI,GO,PMC_D)robot.Snpx.AO.Write(2, 5);ushort ao3 = robot.Snpx.AO.Read(3);// Clear alarmsrobot.Snpx.ClearAlarms();
ファイルとデコード
IOState ioState = robot.Ftp.GetIOState();// Read a variablevar variableFiles = robot.Ftp.GetAllVariables();foreach (var variableFile in variableFiles)foreach (var variable in variableFile.Variables)Console.WriteLine($"{variable.Name} = {variable.Value}");// Read system variable $RMT_MASTERint remoteMode = robot.Ftp.KnownVariableFiles.GetSystemFile().RmtMaster;// Read safety statusSafetyStatus safetyStatus = robot.Ftp.GetSafetyStatus();Console.WriteLine($"Emergency Stop: {safetyStatus.ExternalEStop}");Console.WriteLine($"Teach Pendant Enabled: {safetyStatus.TPEnable}");// Get current position for each arm (Joints, World position of each tool, user frame positions)CurrentPosition currentPosition = robot.Ftp.GetCurrentPosition();// Upload a TP program to the controllerrobot.Ftp.DirectFileHandling.UploadFileToController(@"C:\Programs\MyPrg.tp", "md:/MyPrg.tp");// Download a file from the robotrobot.Ftp.DirectFileHandling.DownloadFileFromController("md:/Backup.va", @"C:\Backup\Backup.va");// Delete a file on the robotrobot.Ftp.DirectFileHandling.DeleteFile("md:/OldProgram.tp");
逆運動学
// Get DH parameters// Example: CRX-10iA/LDhParameters dh = new DhParameters(-540, 150, -160, 0, 710, 0);// From a known arm modeldh = DhParameters.FromArmKinematicModel(ArmKinematicModels.CRX10iA);// From OPW parameters: M10iA/7Ldh = DhParameters.FromOpwParameters(0.15, -0.20, 0.60, 0.86, 0.10);// From an online robot (SYSMOTN file)dh = DhParameters.FromSymotnFile(robot.Ftp.KnownVariableFiles.GetSymotnFile())[0];// Forward kinematicsCartesianPosition pose = KinematicsUtils.ForwardKinematics(position, dh);// Inverse kinematics with multiple solutionsJointsPosition[] positions = KinematicsUtils.InverseKinematics(pose, dh);
Motion Interfaces
// Initialize the RMI_MOVE program on the controller.// TP must be disabled and the controller must be in AUTO mode.robot.Rmi.Initialize();// Linear motion at 100 mm/s to a Cartesian target (tool 1, frame 0)var instr = new LinearMotionTpInstruction{SpeedType = RmiLinearSpeedType.MmSec,Speed = 100,TermType = RmiTerminationType.Fine,Target = new CartesianPositionWithUserFrame(500, 200, 300, 0, 90, 0, tool: 1, frame: 0)};RmiInstructionResponse r = robot.Rmi.SendTpInstruction(instr);// Wait for the controller to confirm the motion completedr.WaitForCompletion();if (r.Status == RmiInstructionStatus.Error)System.Console.WriteLine("Error: " + r.ErrorText);// Abort when done — always end the session with Abort() or Disconnect()robot.Rmi.Abort();robot.Disconnect();
オフラインツール
// Parse a variable file and extract a hierarchical list of variablesGenericVariableFile vaFile = FanucFileReaders.VariableReader.ReadFile("C:/path/to/variable.va", Languages.English);foreach (var variable in vaFile.Variables)Console.WriteLine($"{variable.Name} = {variable.Value} [{variable.Type}]");// Edit and regenerate the variable filevaFile.GenerateVa("C:/path/to/variable_modified.va\"");// Parse several types of filesFanucFileReaders.ErrorListReader.ReadFile("C:/path/to/errall.ls", Languages.English);FanucFileReaders.IOStateReader.ReadFile("C:/path/to/iostate.dg", Languages.English);FanucFileReaders.SafetyStatusReader.ReadFile("C:/path/to/safety.dg", Languages.English);FanucFileReaders.CurrentPositionReader.ReadFile("C:/path/to/curpos.dg", Languages.English);
ドキュメントを閲覧します
ガイドとハウツー記事
SDKは、複数のネイティブEthernetプロトコルを通じてFanucロボットの主要機能をカバーしています。コントローラにインストールされたオプションや世代によって、利用可能なプロトコルが異なります。以下の各記事では、特定のタスクの実行方法を説明し、さまざまなアプローチを比較しています。
ダウンロードとテスト


SDKのすべての機能を簡単なインターフェイスでテストできます。 この例は、.NET 8を使用して「Self Conted」および「Single File」でコンパイルされています。アプリケーションはインストールなしでポータブルです。
利用規約を見る

見積もりと注文をリクエストしてください
価格
ライブラリは無料でダウンロードでき、30日間テストできます。 この期間の後、トライアル期間を延長するように頼むか、自分に最適なライセンスを購入することができます: サイト (不明瞭なバイナリのみ) またはソース (ソースコード) 。 購入後、1年のメンテナンス期間があり、サポートへの優先アクセスと更新の可能性が得られます。 使用するライセンスを購入する場合、ロボットブランドにリンクされているため、顧客に再配布するロボット、開発者、またはソフトウェアの数に関係なく、繰り返し料金を払うことなく永久に使用できます。 あなたがディストリビューターであり、お客様に当社の製品のいずれかを提供したい場合は、特別な条件と価格について話し合うためにお問い合わせください。