Fanuc SDK
1100 (EUR) • 1300 (USD)
1100
€
de por vida660
€
para universidades (40% de descuento)Cree rápidamente aplicaciones .NET que se comuniquen con su robot industrial FanUC.
.NET
Python
LabVIEW
Plug & Play
Conecta tu robot en tan solo unos minutos. No es necesario instalar un administrador de licencias ni una llave USB. Sólo haga referencia a la biblioteca.
No hay complementos para instalar en el robot
Uso de protocolos de red proporcionados como estándar por el controlador de robots.
Karel ROS
Prueba de 30 días
Pruébelo gratis durante 30 días, sin compromiso, no se requiere registro
Pagar una vez, use para siempre
Licencia perpetua, no se requiere suscripción, independientemente del número de robots, desarrolladores o software redistribuido
Historias de éxito de clientes
Descubra cómo nuestros clientes integran las soluciones UnderAutomation en sus proyectos industriales.




Características del SDK Fanuc: Telnet, SNPX, FTP y cinemática
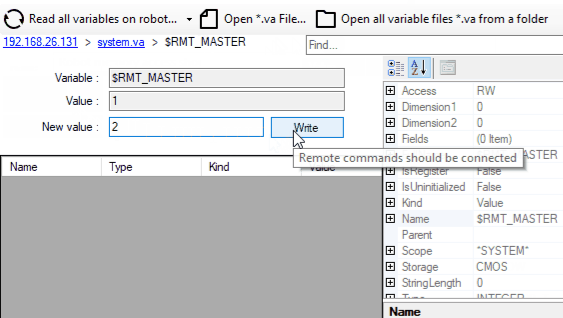
Comandos remotos
// Reset alarmsrobot.Telnet.Reset();// Run a programrobot.Telnet.Run("MyProgram");robot.Telnet.Pause("MyProgram");robot.Telnet.Hold("MyProgram");robot.Telnet.Continue("MyProgram");robot.Telnet.Abort("MyProgram", force: true);// Set a variablerobot.Telnet.SetVariable("$RMT_MASTER", 1);// Set an output port (example: DOUT port 2 = 0)robot.Telnet.SetPort(KCLPorts.DOUT, 2, 0);// Simulate an input port (example: DIN port 3 = 1)robot.Telnet.Simulate(KCLPorts.DIN, 3, 1);robot.Telnet.Unsimulate(KCLPorts.DIN, 3);
Lectura y escritura de datos de alta velocidad
// Read a registerPosition posReg1 = robot.Snpx.PositionRegisters.Read(1);float numReg5 = robot.Snpx.NumericRegisters.Read(5);string strReg10 = robot.Snpx.StringRegisters.Read(10);// Write a registerposReg1.CartesianPosition.X = 100;robot.Snpx.PositionRegisters.Write(1, posReg1);robot.Snpx.NumericRegisters.Write(2, 123.45f);robot.Snpx.StringRegisters.Write(3, "Hello, world!");// Read a variableint rmtMaster = robot.Snpx.IntegerSystemVariables.Read("$RMT_MASTER");string lastAlm = robot.Snpx.StringSystemVariables.Read("$ALM_IF.$LAST_ALM");Position cellFloor = robot.Snpx.PositionSystemVariables.Read("$CELL_FLOOR");// Write a system variablerobot.Snpx.IntegerSystemVariables.Write("$RMT_MASTER", 1);robot.Snpx.StringSystemVariables.Write("$ALM_IF.$LAST_ALM", "No alarms");robot.Snpx.PositionSystemVariables.Write("$CELL_FLOOR", cellFloor);// Write a Karel program variablerobot.Snpx.IntegerSystemVariables.Write("$[KarelProgram]KarelVariable", 1);// Read and Write I/O (SDI,SDO,RDI,RDO,UI,UO,SI,SO,WI,WO,WSI,PMC_K,PMC_R)robot.Snpx.RDO.Write(1, true);ushort ai5 = robot.Snpx.AI.Read(5);// Read and Write analogs (AI,AO,GI,GO,PMC_D)robot.Snpx.AO.Write(2, 5);ushort ao3 = robot.Snpx.AO.Read(3);// Clear alarmsrobot.Snpx.ClearAlarms();
Archivo y decodificación
IOState ioState = robot.Ftp.GetIOState();// Read a variablevar variableFiles = robot.Ftp.GetAllVariables();foreach (var variableFile in variableFiles)foreach (var variable in variableFile.Variables)Console.WriteLine($"{variable.Name} = {variable.Value}");// Read system variable $RMT_MASTERint remoteMode = robot.Ftp.KnownVariableFiles.GetSystemFile().RmtMaster;// Read safety statusSafetyStatus safetyStatus = robot.Ftp.GetSafetyStatus();Console.WriteLine($"Emergency Stop: {safetyStatus.ExternalEStop}");Console.WriteLine($"Teach Pendant Enabled: {safetyStatus.TPEnable}");// Get current position for each arm (Joints, World position of each tool, user frame positions)CurrentPosition currentPosition = robot.Ftp.GetCurrentPosition();// Upload a TP program to the controllerrobot.Ftp.DirectFileHandling.UploadFileToController(@"C:\Programs\MyPrg.tp", "md:/MyPrg.tp");// Download a file from the robotrobot.Ftp.DirectFileHandling.DownloadFileFromController("md:/Backup.va", @"C:\Backup\Backup.va");// Delete a file on the robotrobot.Ftp.DirectFileHandling.DeleteFile("md:/OldProgram.tp");
Cinemática inversa
// Get DH parameters// Example: CRX-10iA/LDhParameters dh = new DhParameters(-540, 150, -160, 0, 710, 0);// From a known arm modeldh = DhParameters.FromArmKinematicModel(ArmKinematicModels.CRX10iA);// From OPW parameters: M10iA/7Ldh = DhParameters.FromOpwParameters(0.15, -0.20, 0.60, 0.86, 0.10);// From an online robot (SYSMOTN file)dh = DhParameters.FromSymotnFile(robot.Ftp.KnownVariableFiles.GetSymotnFile())[0];// Forward kinematicsCartesianPosition pose = KinematicsUtils.ForwardKinematics(position, dh);// Inverse kinematics with multiple solutionsJointsPosition[] positions = KinematicsUtils.InverseKinematics(pose, dh);
Motion Interfaces
// Initialize the RMI_MOVE program on the controller.// TP must be disabled and the controller must be in AUTO mode.robot.Rmi.Initialize();// Linear motion at 100 mm/s to a Cartesian target (tool 1, frame 0)var instr = new LinearMotionTpInstruction{SpeedType = RmiLinearSpeedType.MmSec,Speed = 100,TermType = RmiTerminationType.Fine,Target = new CartesianPositionWithUserFrame(500, 200, 300, 0, 90, 0, tool: 1, frame: 0)};RmiInstructionResponse r = robot.Rmi.SendTpInstruction(instr);// Wait for the controller to confirm the motion completedr.WaitForCompletion();if (r.Status == RmiInstructionStatus.Error)System.Console.WriteLine("Error: " + r.ErrorText);// Abort when done — always end the session with Abort() or Disconnect()robot.Rmi.Abort();robot.Disconnect();
Herramientas fuera de línea
// Parse a variable file and extract a hierarchical list of variablesGenericVariableFile vaFile = FanucFileReaders.VariableReader.ReadFile("C:/path/to/variable.va", Languages.English);foreach (var variable in vaFile.Variables)Console.WriteLine($"{variable.Name} = {variable.Value} [{variable.Type}]");// Edit and regenerate the variable filevaFile.GenerateVa("C:/path/to/variable_modified.va\"");// Parse several types of filesFanucFileReaders.ErrorListReader.ReadFile("C:/path/to/errall.ls", Languages.English);FanucFileReaders.IOStateReader.ReadFile("C:/path/to/iostate.dg", Languages.English);FanucFileReaders.SafetyStatusReader.ReadFile("C:/path/to/safety.dg", Languages.English);FanucFileReaders.CurrentPositionReader.ReadFile("C:/path/to/curpos.dg", Languages.English);
Explorar la documentación
Guías y artículos prácticos
El SDK cubre las principales funcionalidades de los robots Fanuc a través de varios protocolos Ethernet nativos. Según las opciones instaladas en su controlador y su generación, algunos protocolos pueden estar disponibles o no. Cada artículo a continuación explica cómo realizar una tarea específica y compara los diferentes enfoques.
Descargar y probar


Le permite probar todas las características del SDK con una interfaz simple. El ejemplo se compila en "auto contenido" y "archivo único" con .NET 8. La aplicación es portátil sin instalación.
Ver condiciones generales

Solicitar una cotización y orden
Precios
Las bibliotecas se pueden descargar de forma gratuita y se pueden probar durante 30 días. Después de este período, puede solicitarnos que extendamos el período de prueba o que compren la licencia que mejor se adapte a usted: Sitio (solo binario oscurecido) o fuente (código fuente). Después de comprar, tiene un período de mantenimiento de un año, lo que le brinda acceso prioritario al soporte y la posibilidad de actualizar. Cuando compra una licencia para usar, está vinculada a una marca de robot, puede usarla para siempre, sin una tarifa recurrente, independientemente de la cantidad de robot, desarrollador o software que redistribuya a sus clientes. Si usted es un distribuidor y desea ofrecer a sus clientes uno de nuestros productos, contáctenos para discutir condiciones y precios especiales.