Descargar
Este SDK (Software Development Kit) está sujeto a licencias. Tiene un periodo de prueba de 30 días.
Descarga a través de NuGet

Añada fácilmente este SDK a su proyecto de Visual Studio a través del gestor de paquetes NuGet.
Ver en nuget.org
Ver en nuget.org
Ejemplos en GitHub
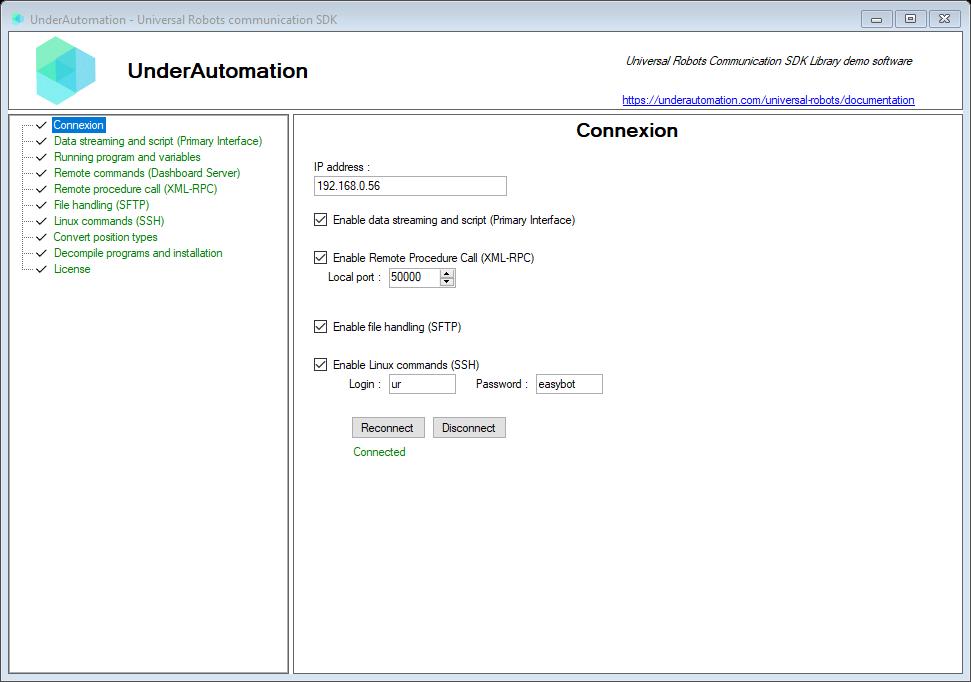
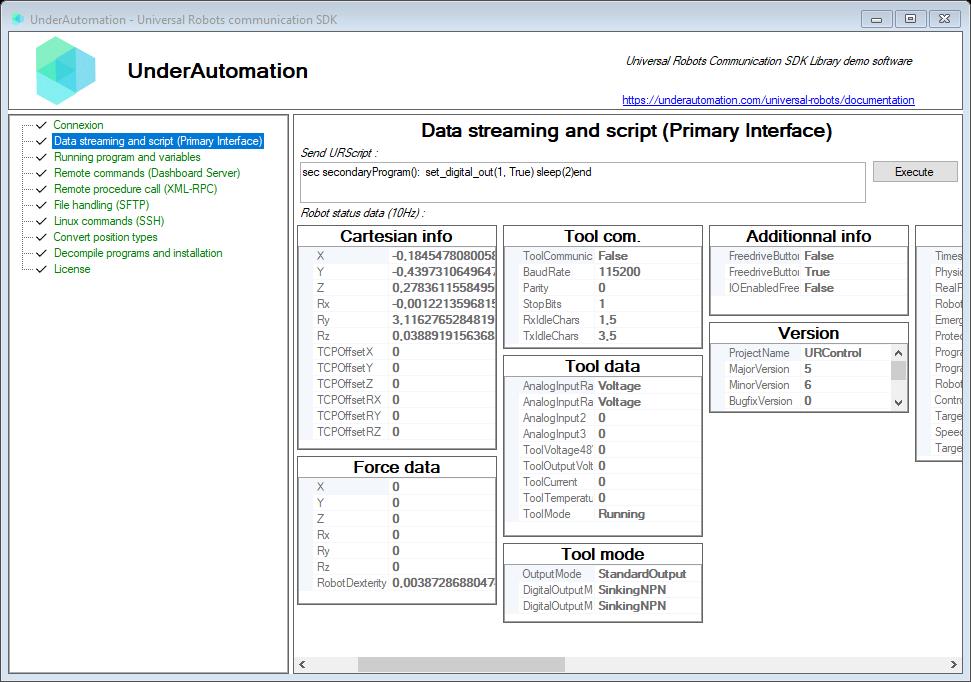
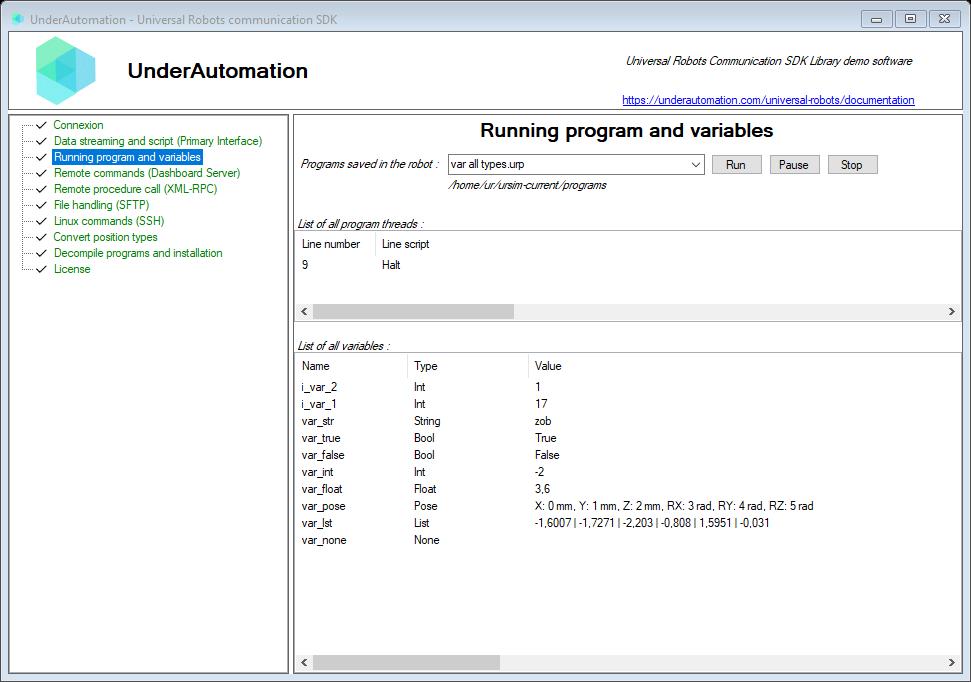
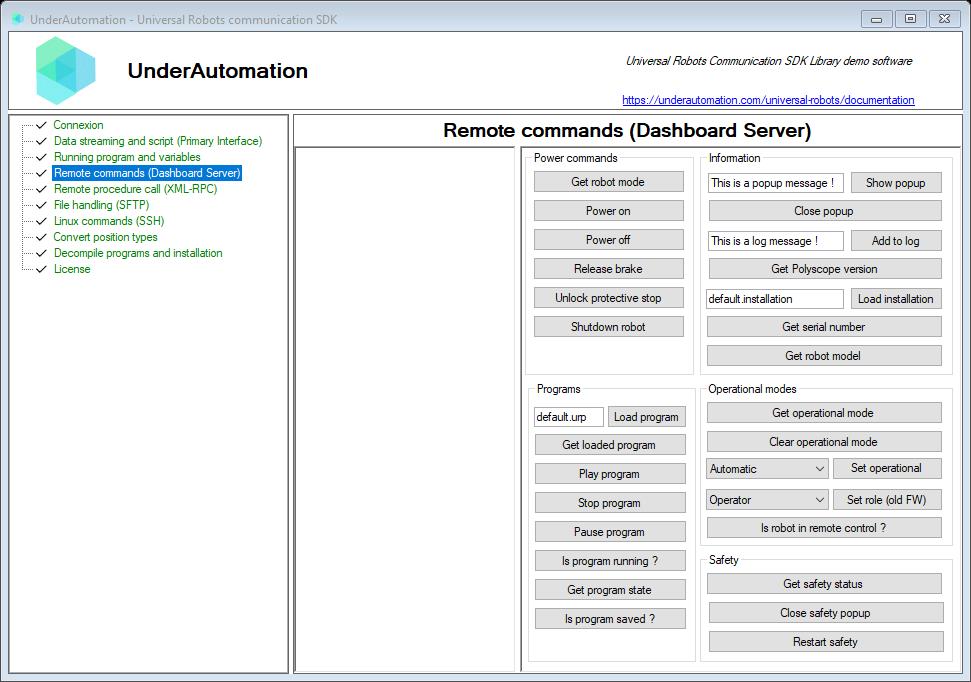
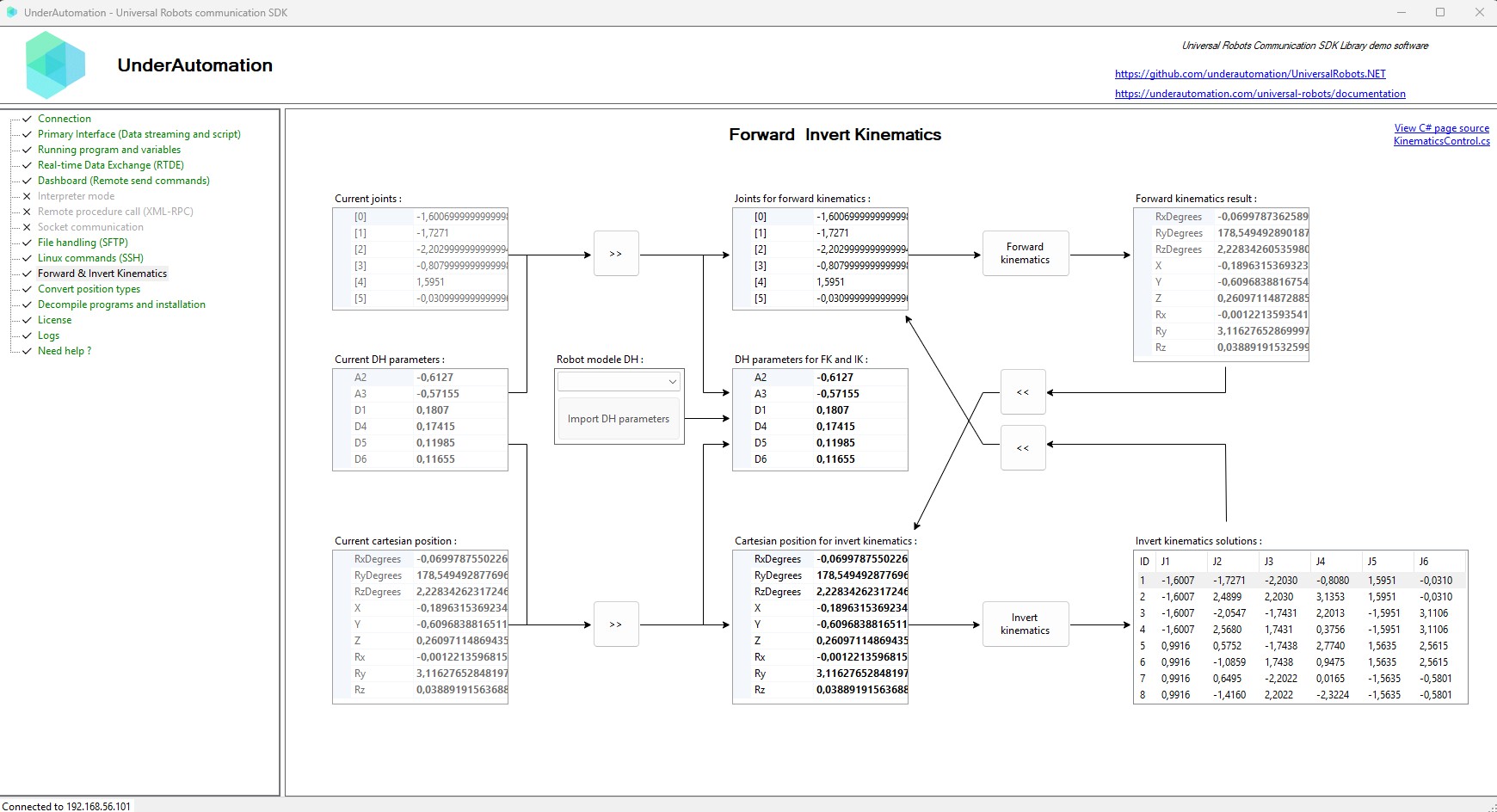
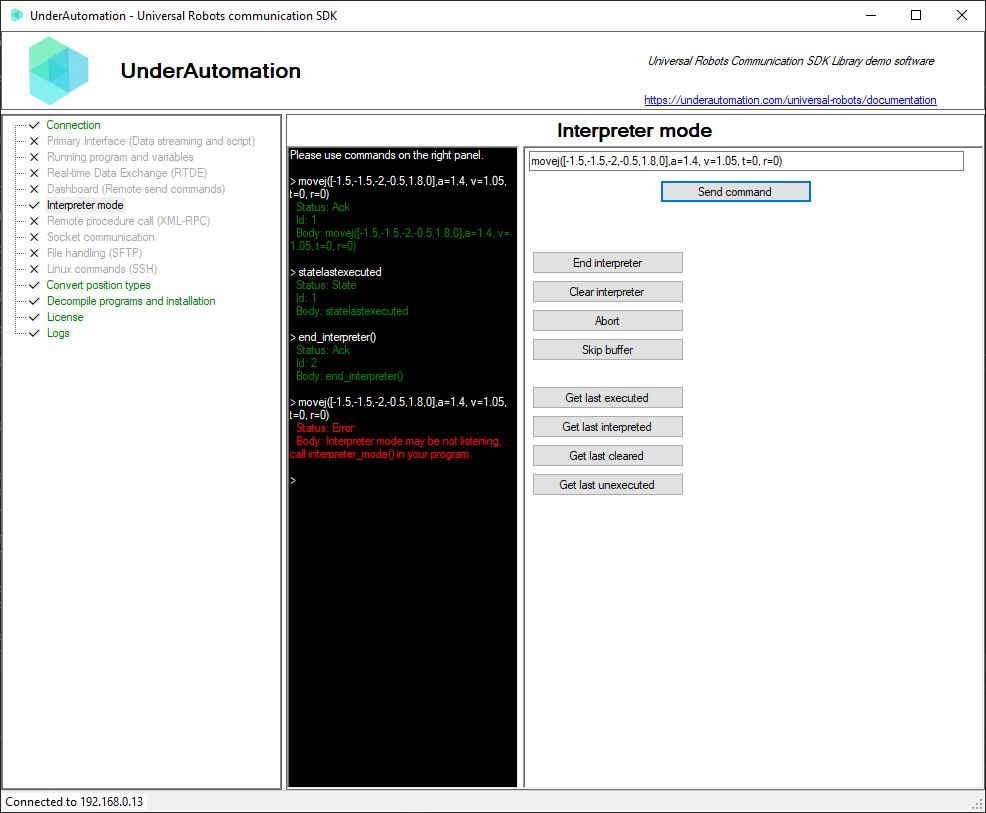
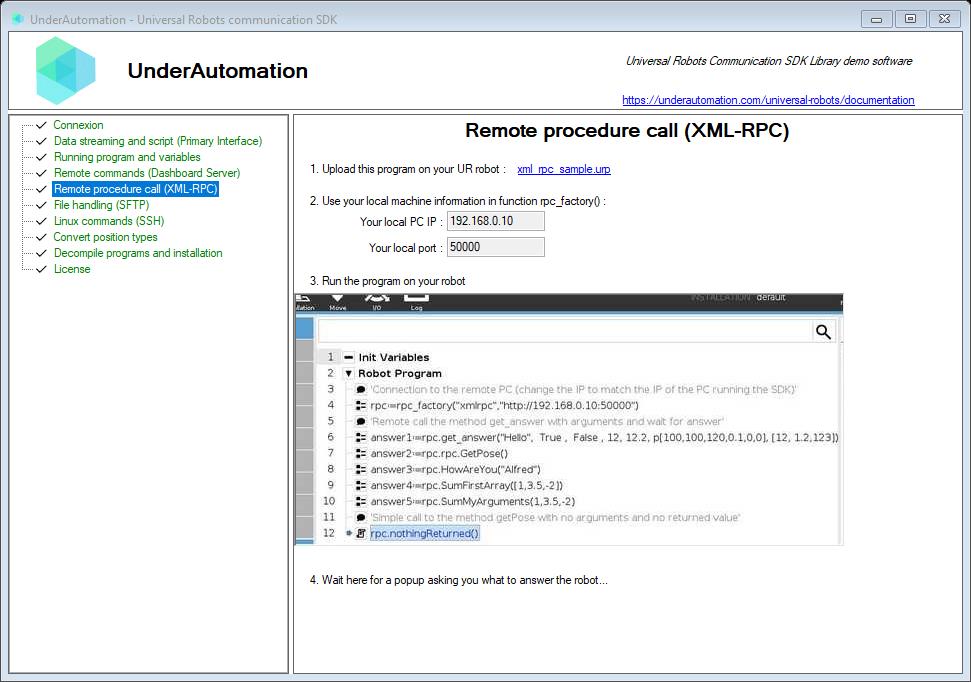
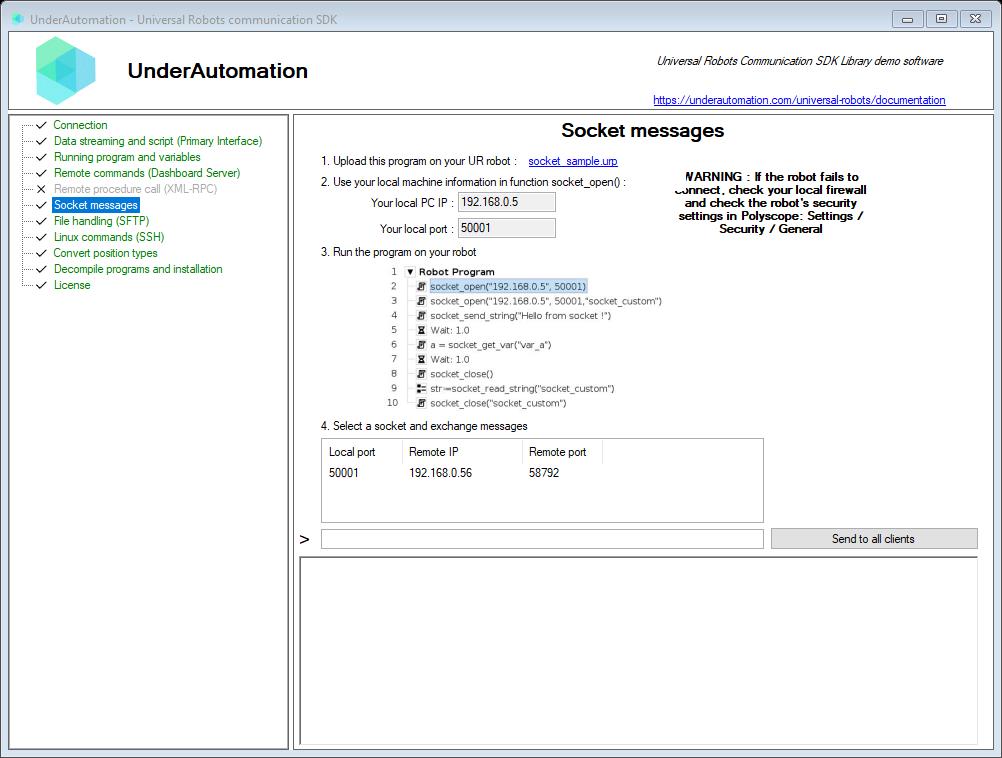
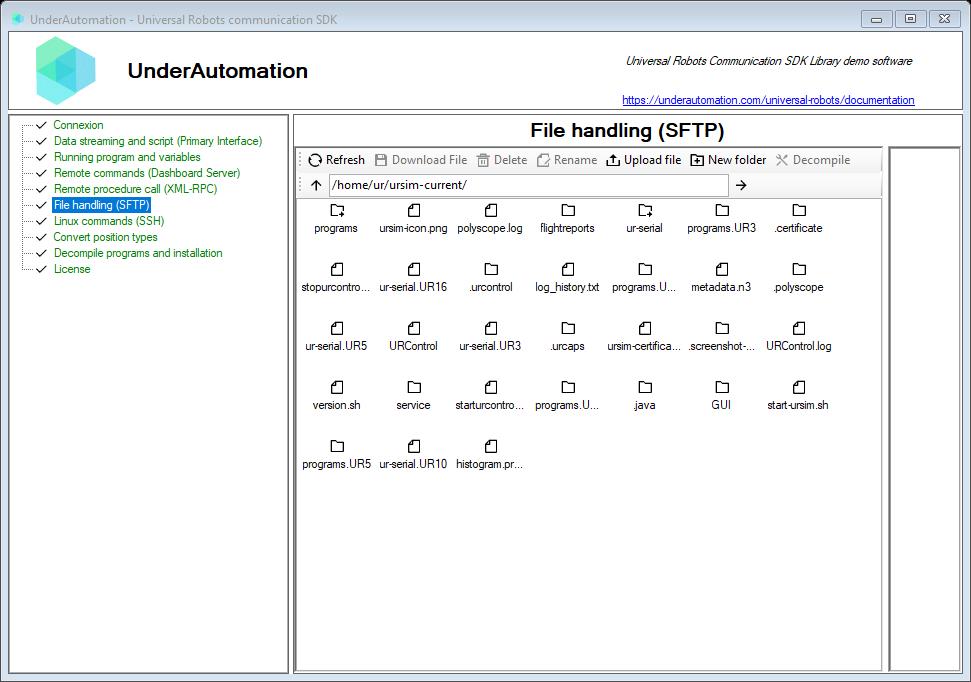
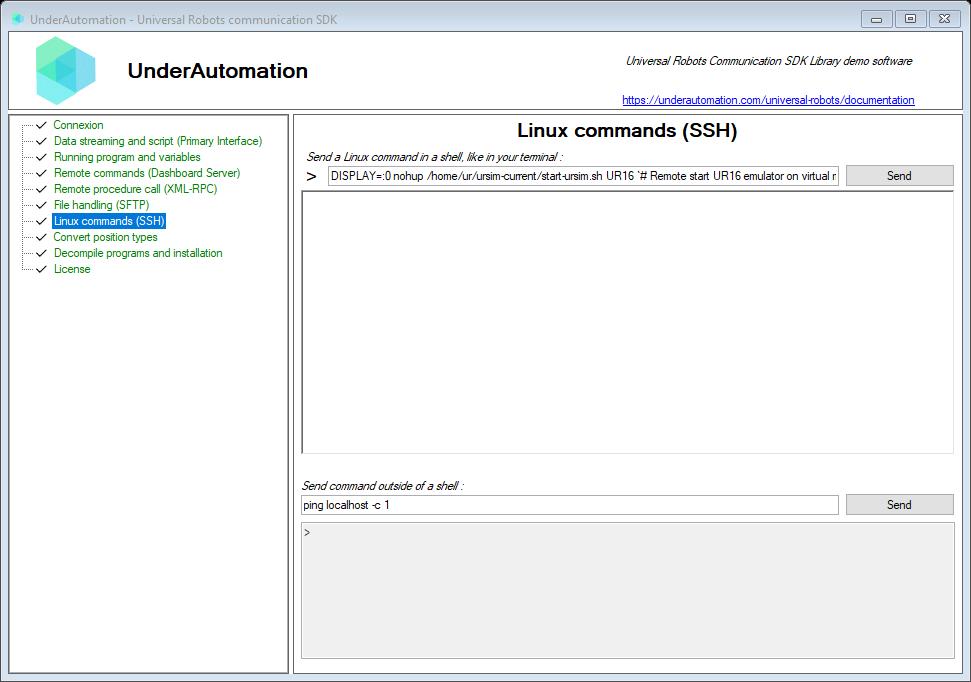
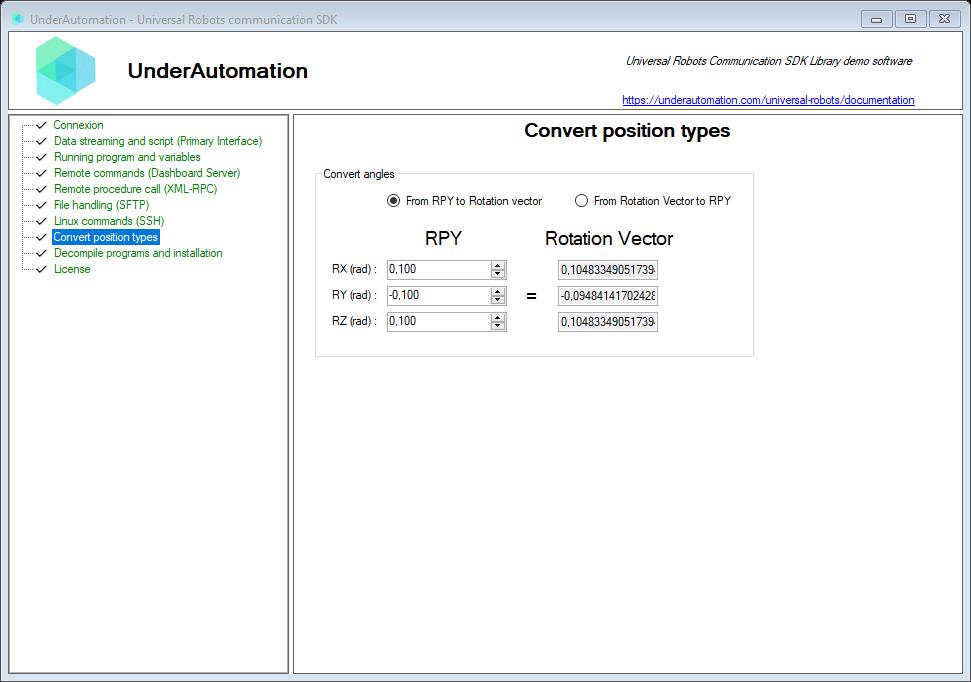
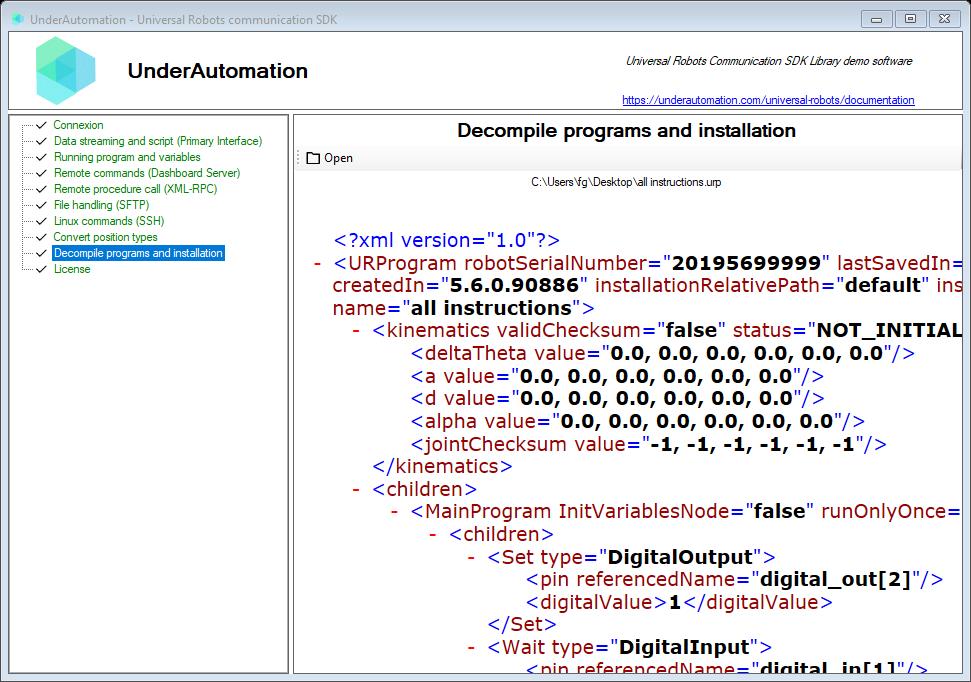
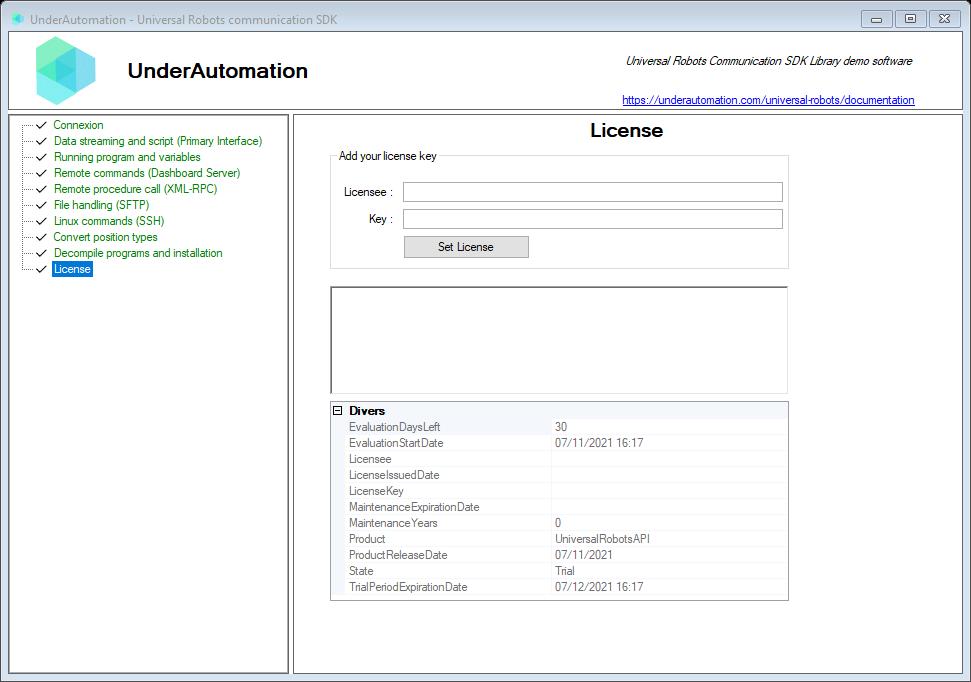
Ejemplo de aplicación Windows
Le permite probar todas las características del SDK con una interfaz simple.
El ejemplo se compila en "auto contenido" y "archivo único" con .NET 8. La aplicación es portátil sin instalación.
Al descargarlo, usted acepta los términos y condiciones de uso: Ver condiciones generales
Descargar (140 MB)
Descargar (140 MB)
Descarga directa
Contiene la DLL UnderAutomation.UniversalRobots.dll en versión AnyCPU para todas las versiones de .NET Framework, así como para .NET Core y .NET 5.
Al descargarlo, usted acepta los términos y condiciones de uso: Ver condiciones generales
Descargar (10 MB)
Descargar (10 MB)
Ejemplo de consola
Ejemplos compilados con .NET Core que permiten probar algunas de las funciones del SDK en Windows, Linux y MacOS.
Al descargarlo, usted acepta los términos y condiciones de uso: Ver condiciones generales
Windows x64 (65 MB)Windows x86 (60 MB)Linux x64 (64 MB)Linux ARM (62 MB)MacOS x64 (64 MB)MacOS ARM64 (71 MB)
Windows x64 (65 MB)Windows x86 (60 MB)Linux x64 (64 MB)Linux ARM (62 MB)MacOS x64 (64 MB)MacOS ARM64 (71 MB)
Ejemplo de Python
Ejemplo de cómo funciona este SDK con Python para recuperar la posición cartesiana de un robot.
Al descargarlo, usted acepta los términos y condiciones de uso: Ver condiciones generales
Descargar (1 MB)
Descargar (1 MB)
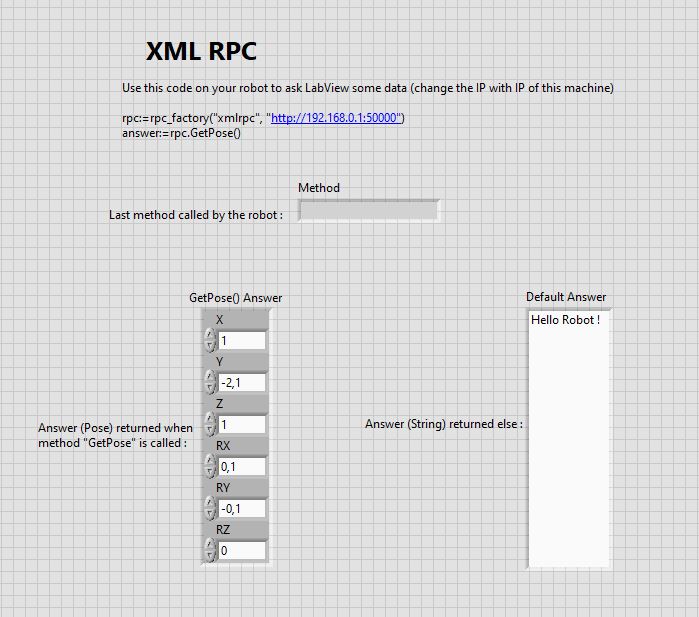
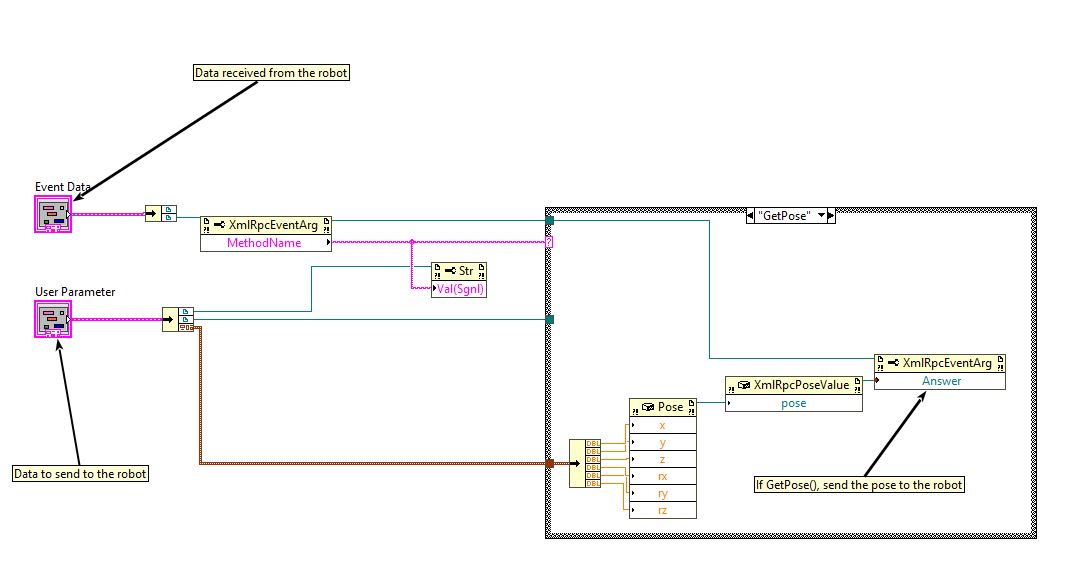
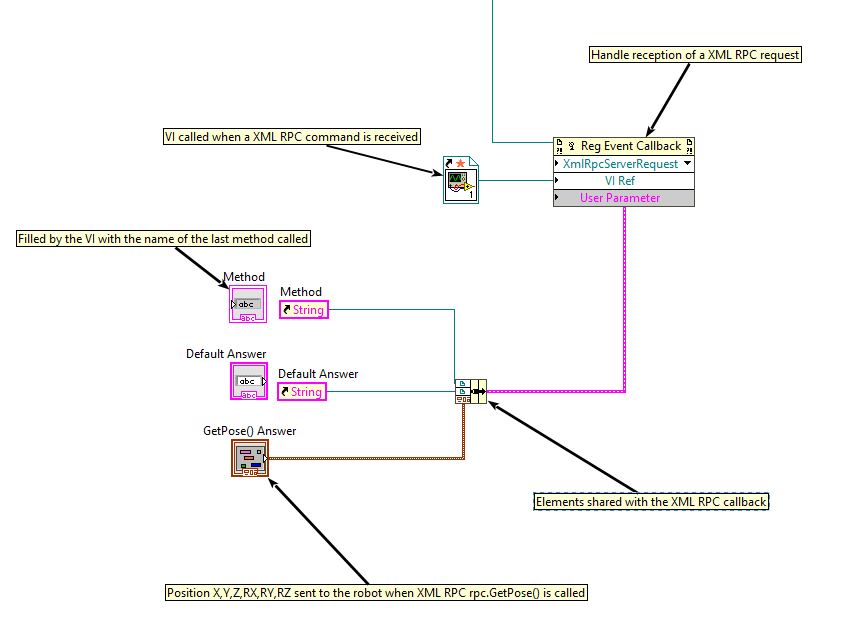
Ejemplo LabVIEW
Ejemplo de un VI que permite probar la mayoría de las funciones de este SDK.
Al descargarlo, usted acepta los términos y condiciones de uso: Ver condiciones generales
Descargar (1 MB)
Descargar (1 MB)