Téléchargement
Ce SDK (Software Development Kit) est soumis à licence. Vous disposez de 30 jours d'essai.
Télécharger via NuGet

Ajouter facilement ce SDK à votre projet Visual Studio via le gestionnaire de package NuGet.
Voir sur nuget.org
Voir sur nuget.org
Exemples sur GitHub
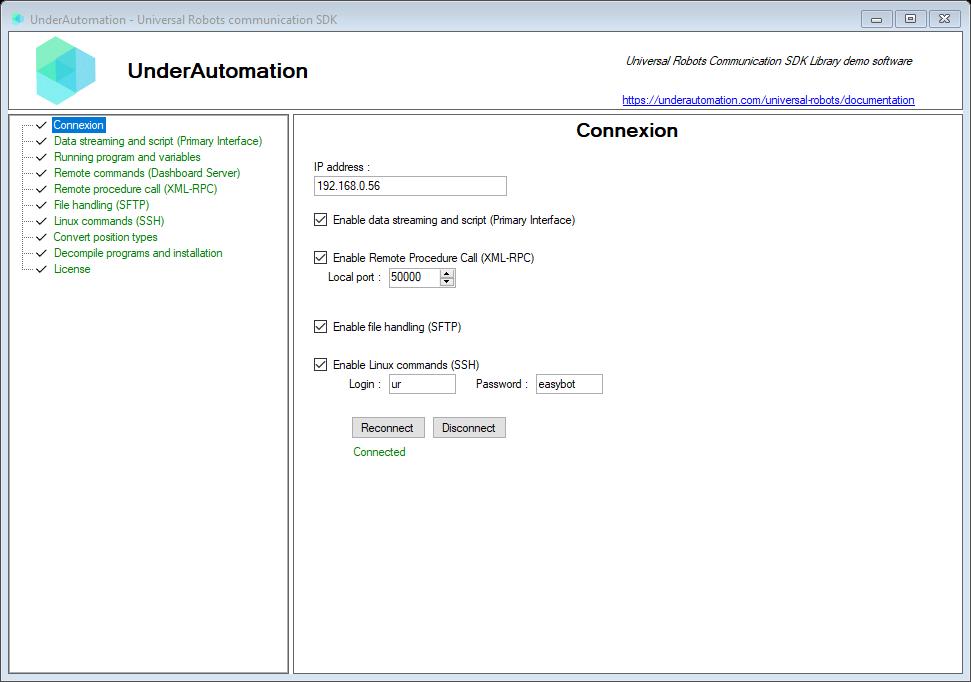
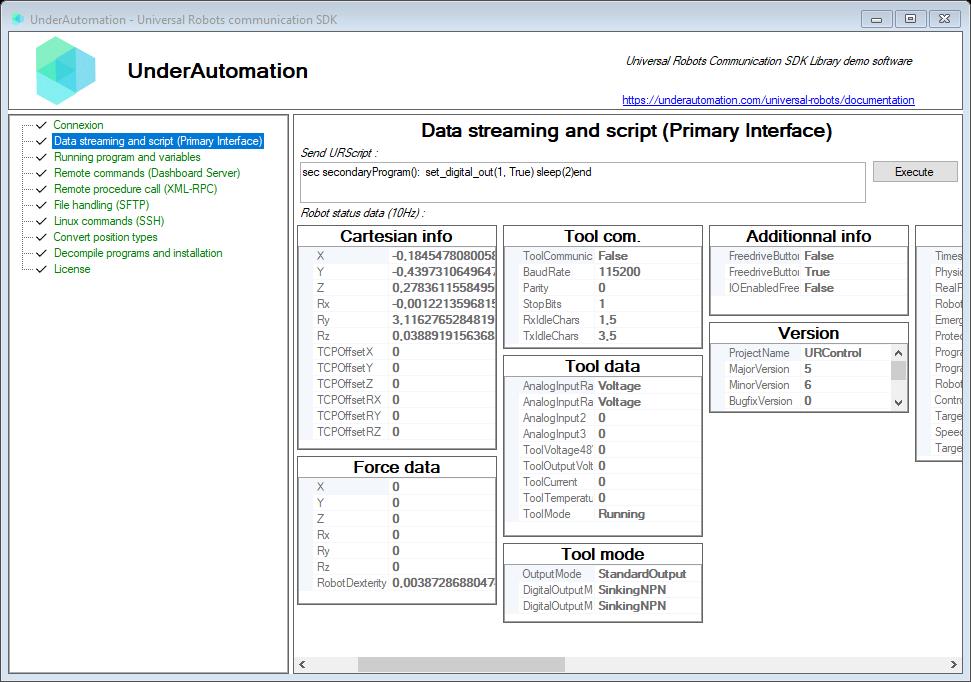
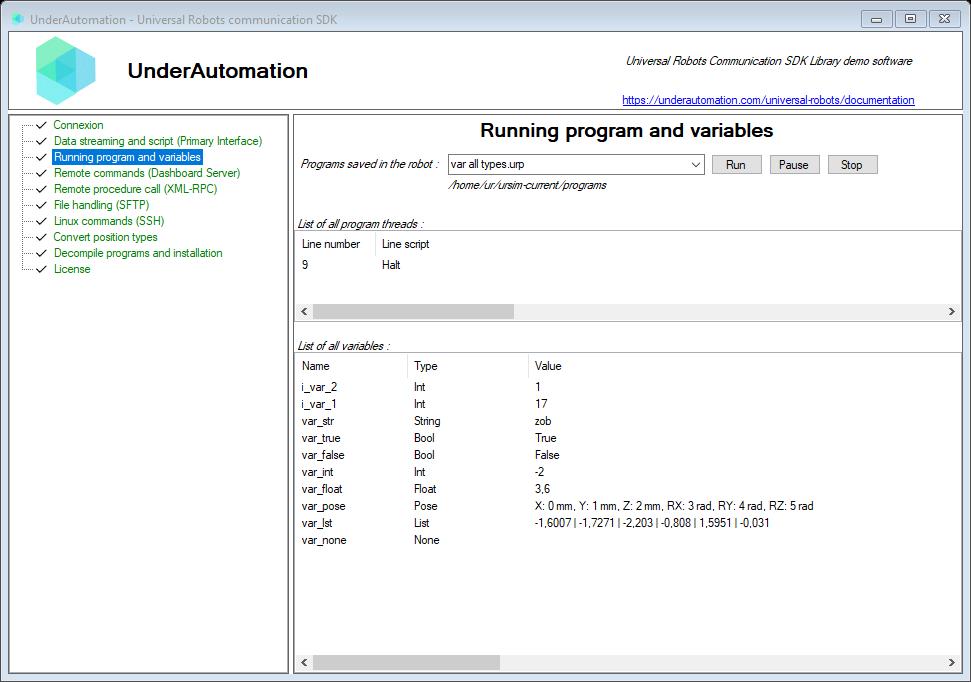
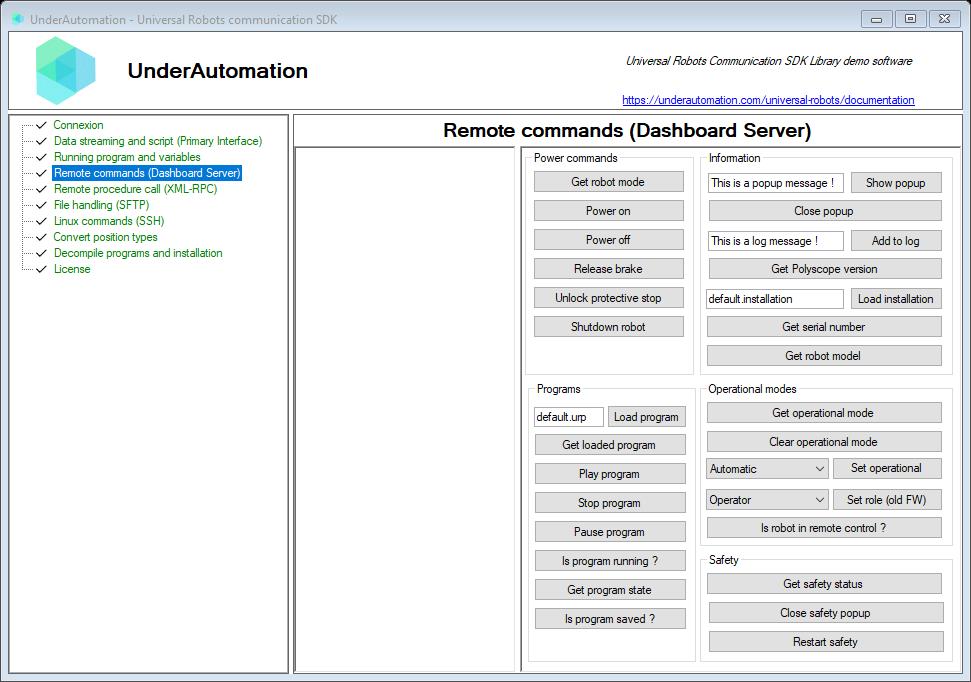
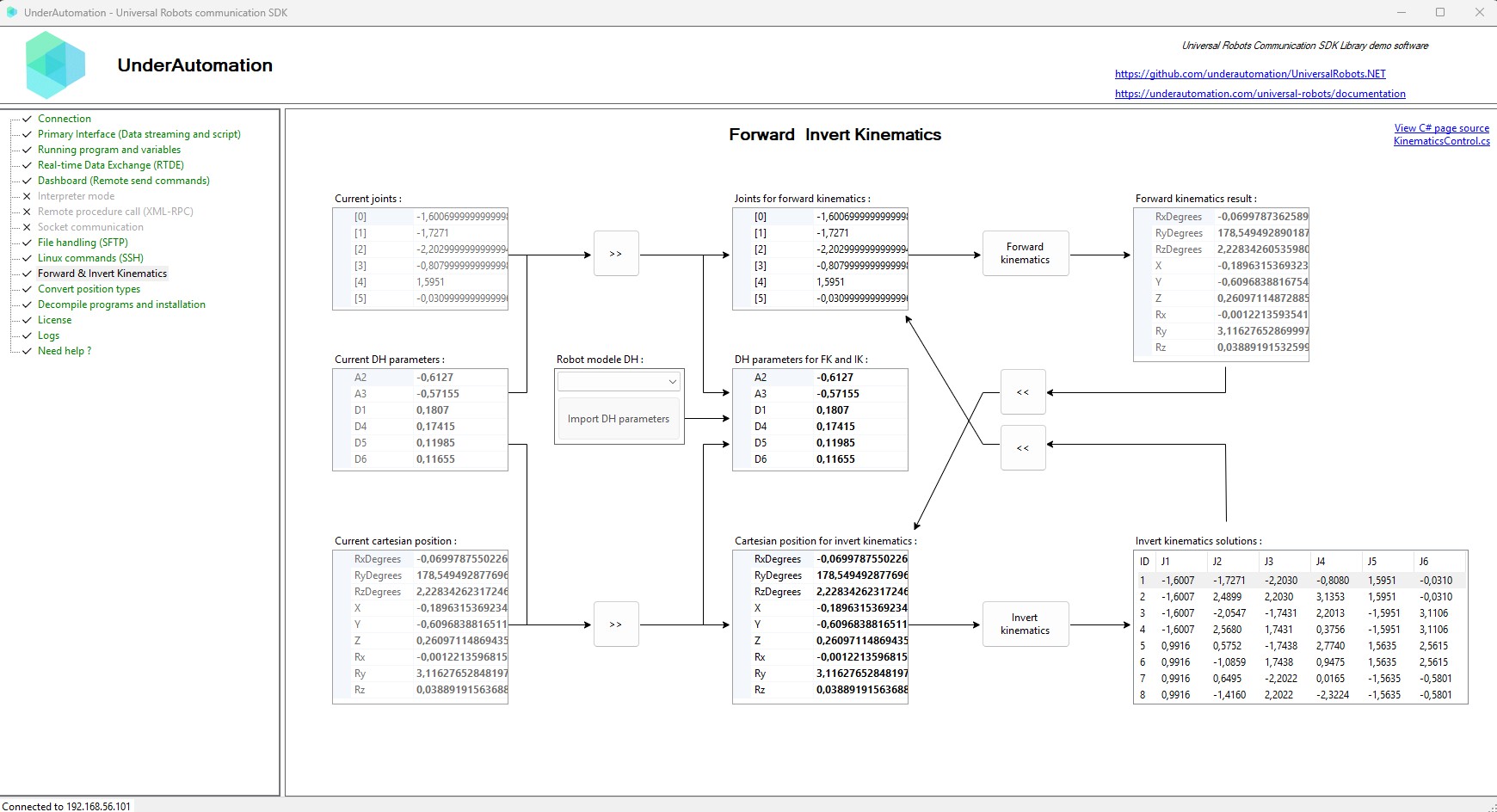
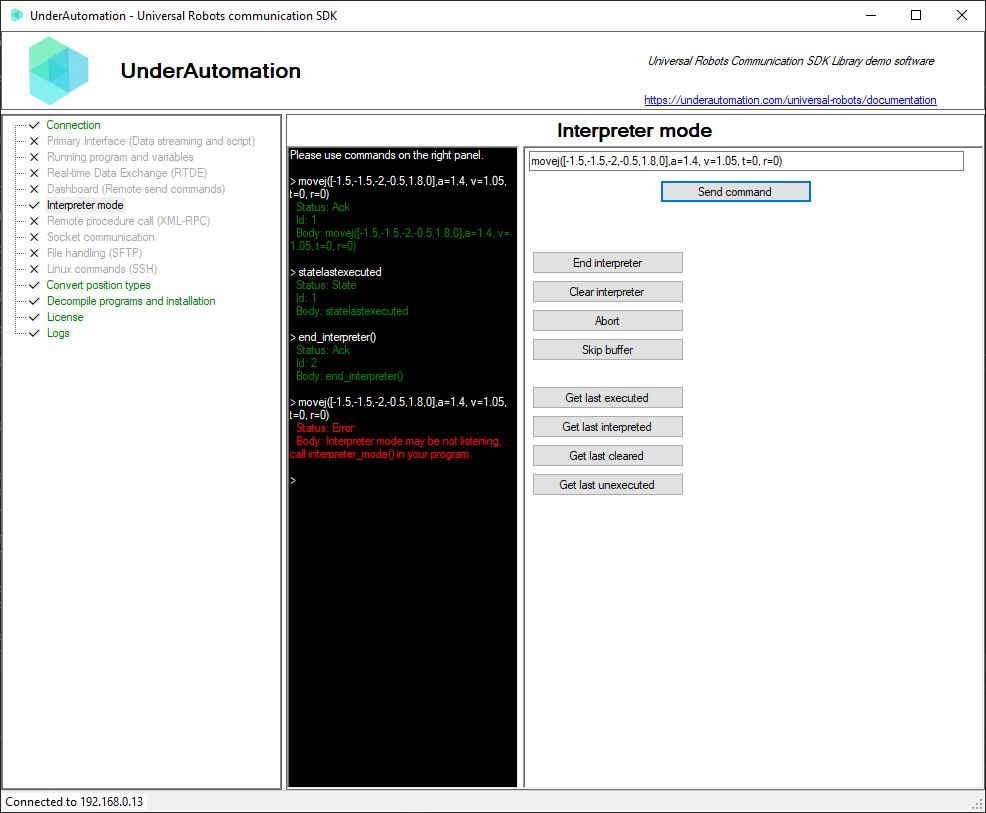
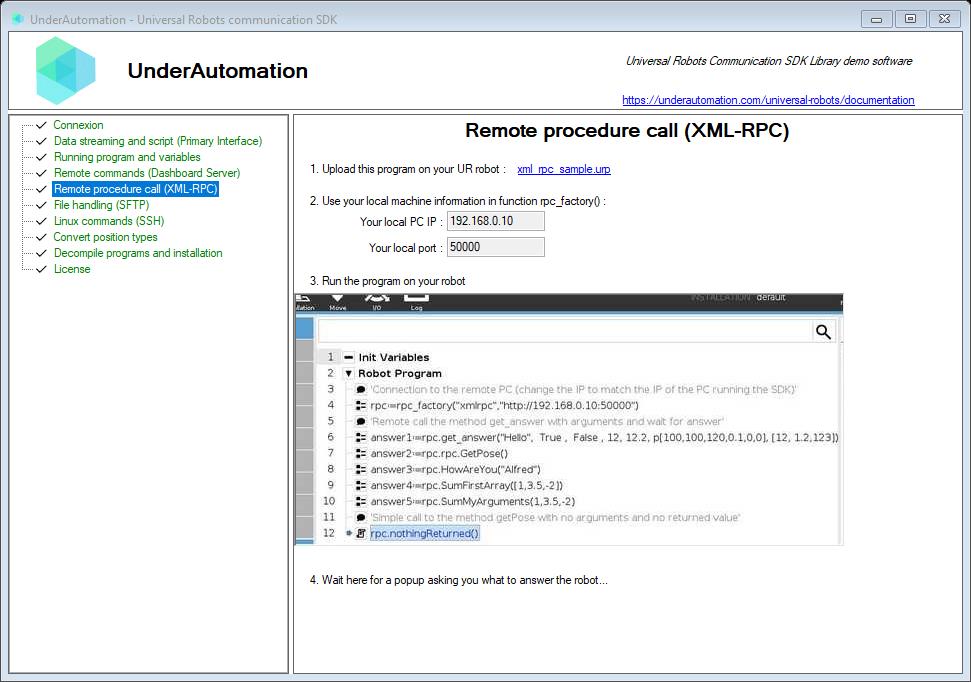
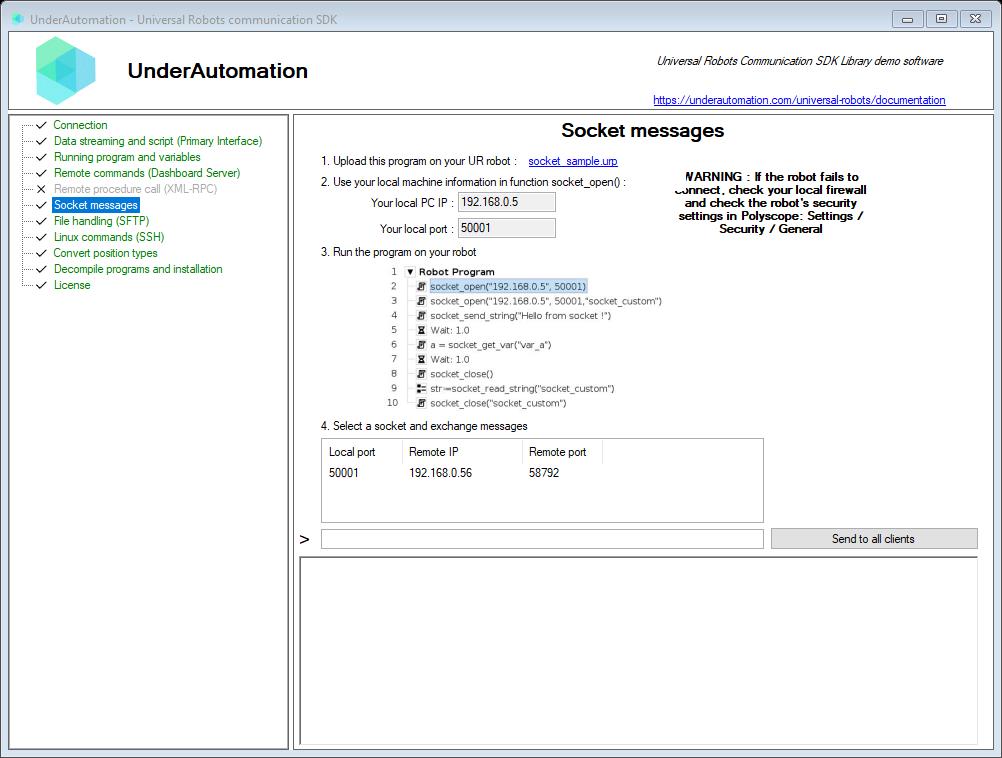
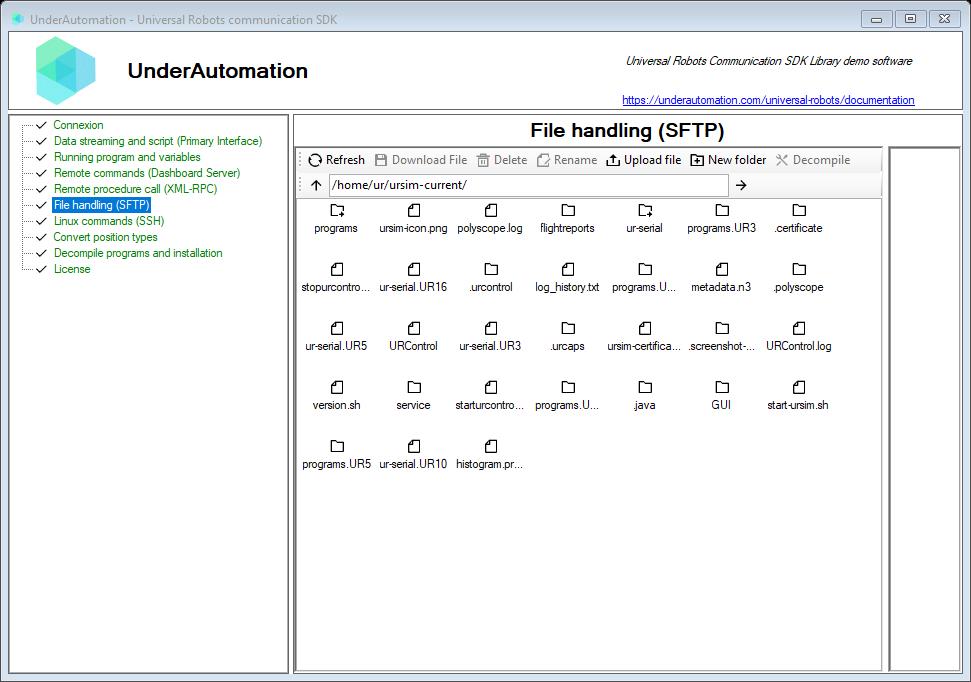
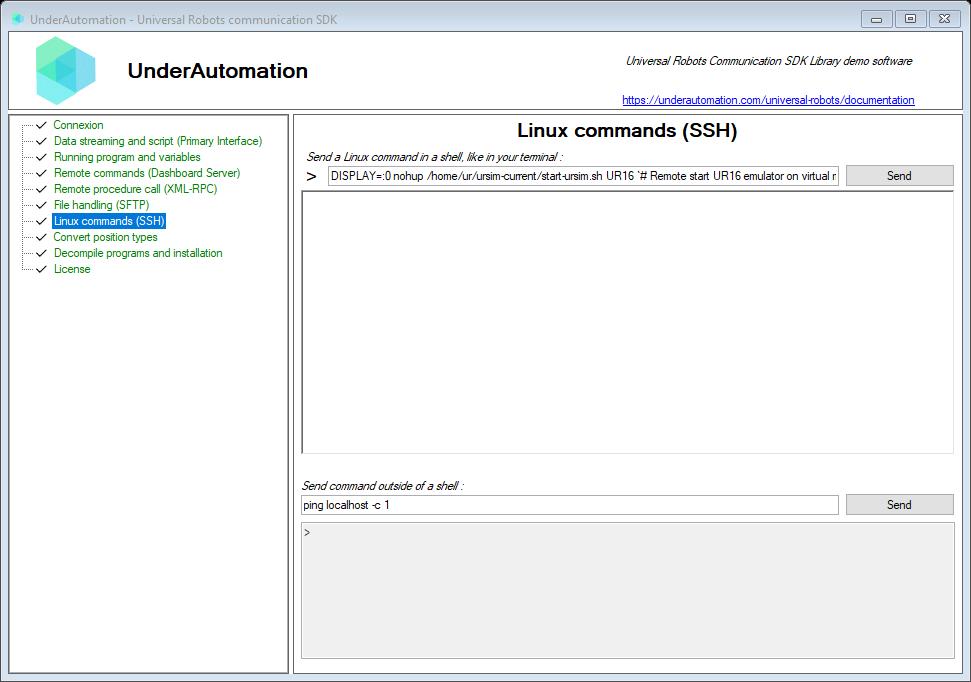
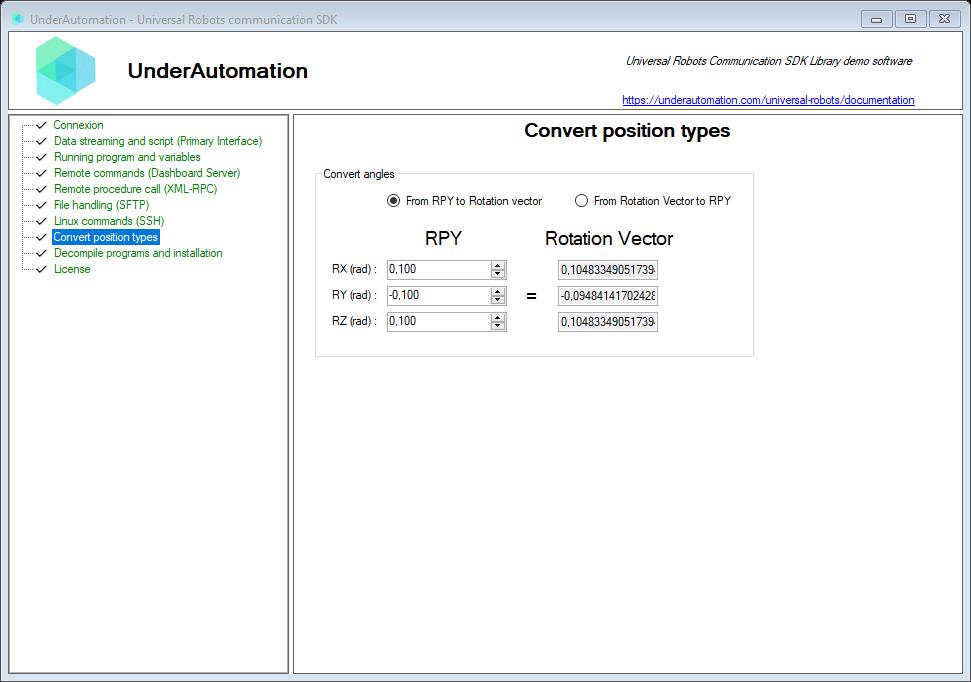
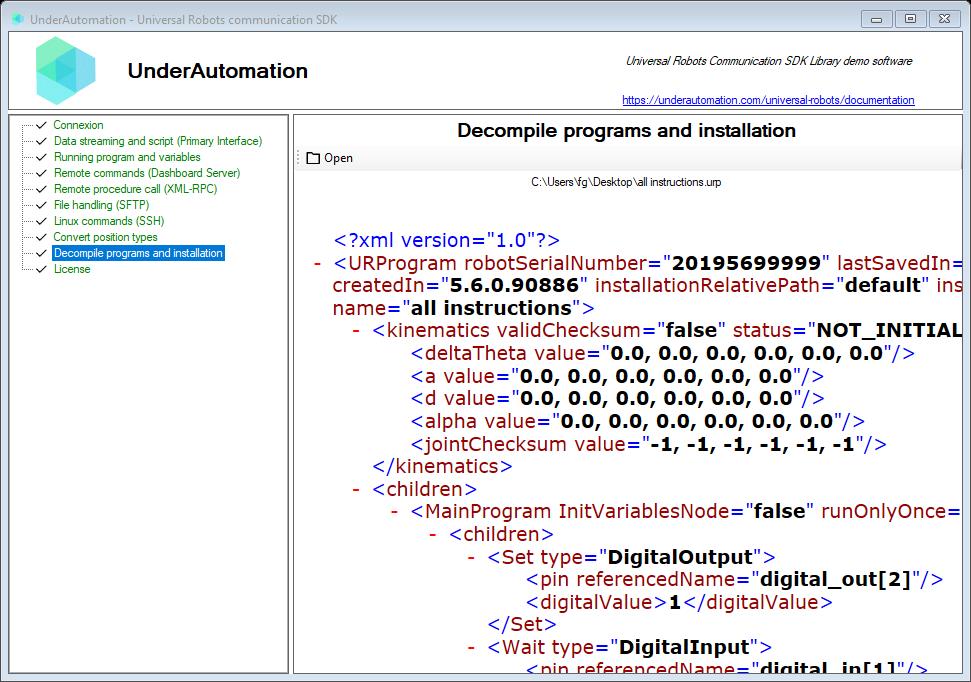
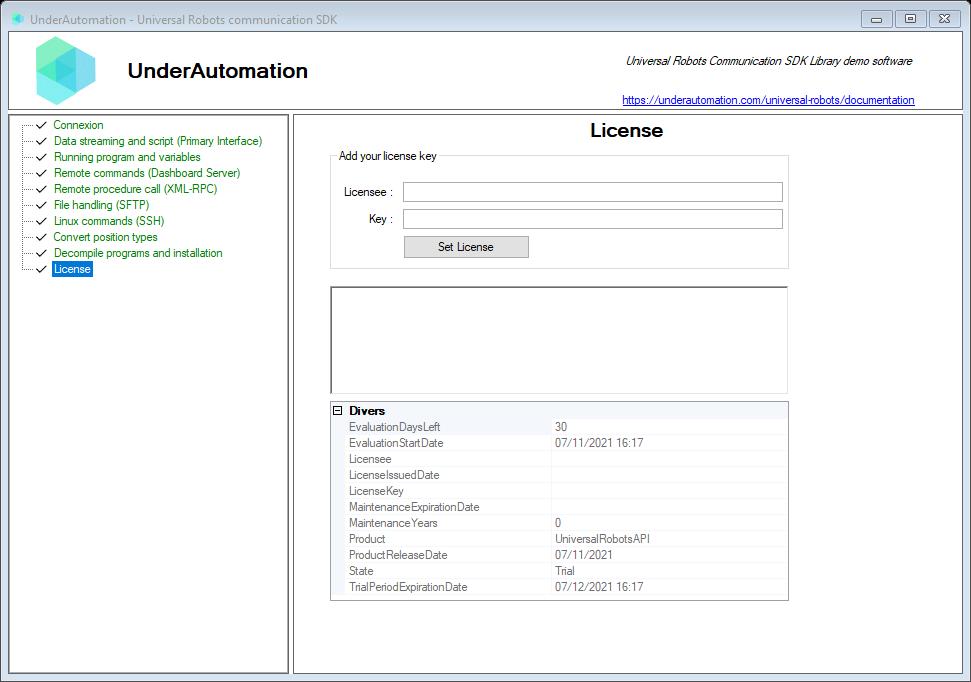
Exemple d'application Windows
Permet de tester toutes les fonctionnalités du SDK avec une interface simple. L'exemple est compilé en "Self Contained" et "Single File" avec .NET 8. L'application est portable sans installation.
En téléchargeant, vous acceptez les conditions générales d'utilisation : Voir les conditions générales d'utilisation
Télécharger (140 MB)
Télécharger (140 MB)
Téléchargement direct
Contient la DLL UnderAutomation.UniversalRobots.dll en version AnyCPU pour toutes les versions du Framework .NET, ainsi que pour .NET Core et .NET 5.
En téléchargeant, vous acceptez les conditions générales d'utilisation : Voir les conditions générales d'utilisation
Télécharger (10 MB)
Télécharger (10 MB)
Exemple console
Exemples compilés avec .NET Core qui permettent de tester quelques fonctions du SDK sous Windows, Linux et MacOS.
En téléchargeant, vous acceptez les conditions générales d'utilisation : Voir les conditions générales d'utilisation
Windows x64 (65 MB)Windows x86 (60 MB)Linux x64 (64 MB)Linux ARM (62 MB)MacOS x64 (64 MB)MacOS ARM64 (71 MB)
Windows x64 (65 MB)Windows x86 (60 MB)Linux x64 (64 MB)Linux ARM (62 MB)MacOS x64 (64 MB)MacOS ARM64 (71 MB)
Exemple Python
Exemple de fonctionnement de ce SDK avec Python permettant de récupérer la position cartésienne d'un robot.
En téléchargeant, vous acceptez les conditions générales d'utilisation : Voir les conditions générales d'utilisation
Télécharger (1 MB)
Télécharger (1 MB)
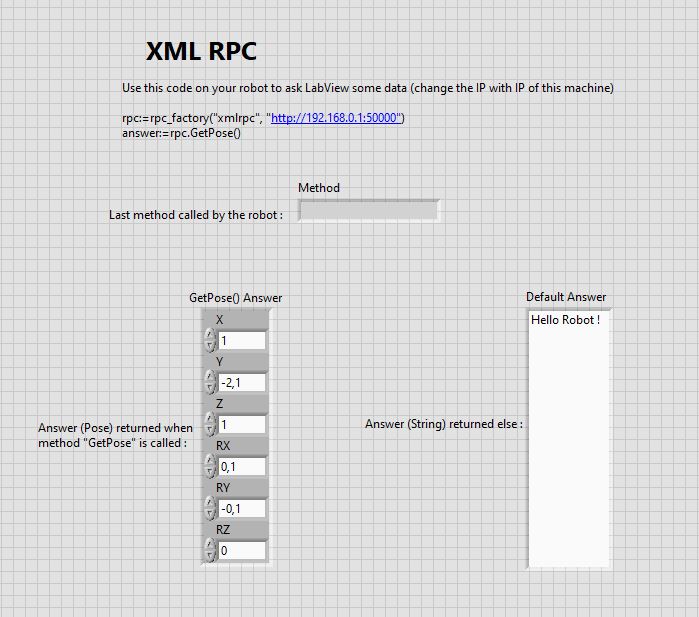
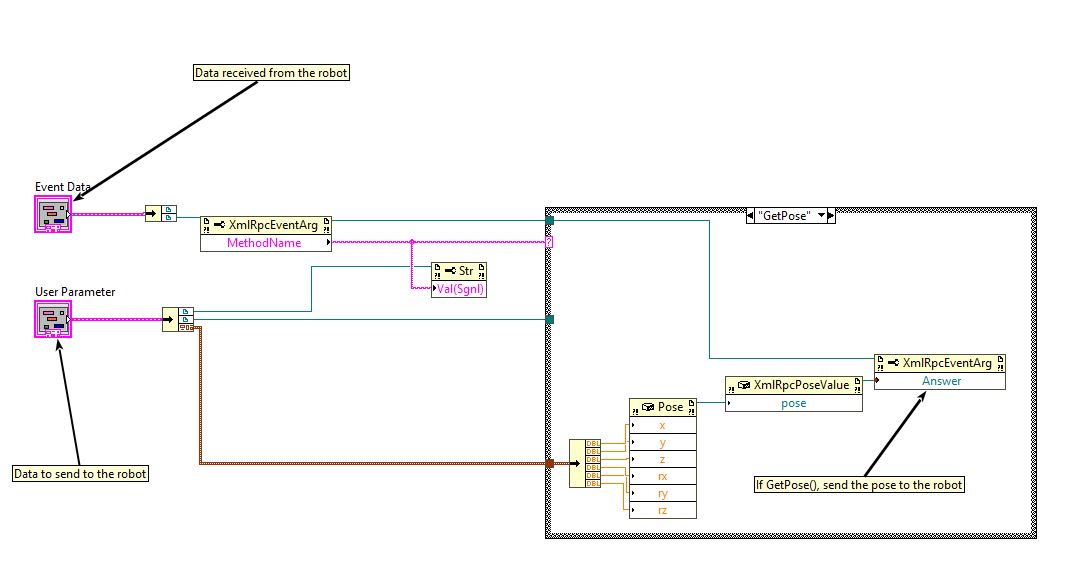
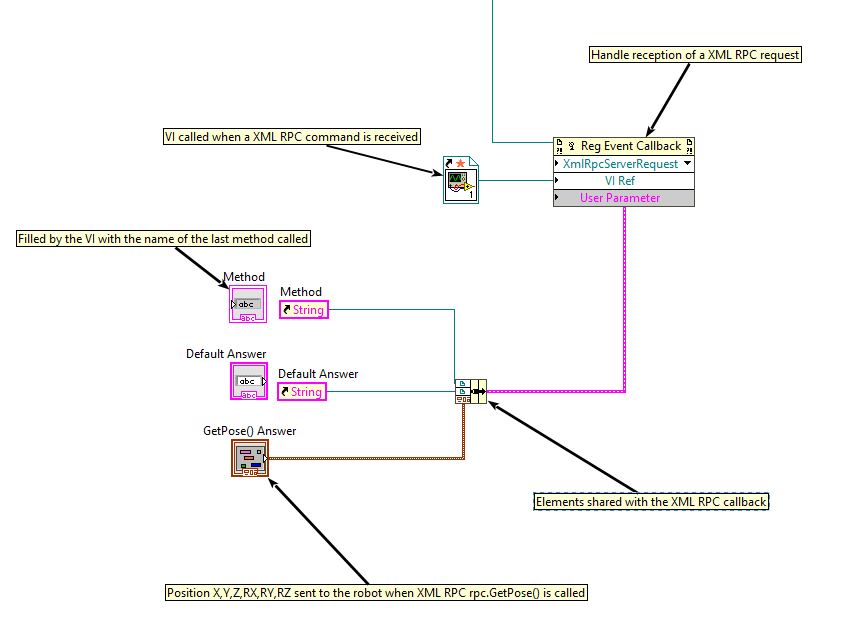
Exemple LabVIEW
Exemple de VI qui permet de tester la plupart des fonctions de ce SDK.
En téléchargeant, vous acceptez les conditions générales d'utilisation : Voir les conditions générales d'utilisation
Télécharger (1 MB)
Télécharger (1 MB)