Bibliothèques de communication pour robots industriels
Intégrez facilement les robots
Universal Robots, Fanuc, Yaskawa, ABB ou Staubli
dans vos applications
.NET, Python, LabVIEW ou Matlab
Boîte à outils • transformation cinématique • manipulation de programme • décodage de fichiers natifs
Payez une fois, utilisez pour toujours • Support technique inclus • Code source disponible

Connectez votre robot industriel en quelques minutes avec notre SDK
Intégrez vos robots industriels en quelques lignes de C# ou Python
Simplifiez la supervision et le contrôle à distance de vos robots industriels grâce aux SDK (Software Development Kit) développés par UnderAutomation. Conçus pour s'adapter à chaque marque de robot, nos bibliothèques permettent une intégration rapide et intuitive, répondant aussi bien aux besoins des utilisateurs finaux qu'à ceux des intégrateurs (OEM).
// C#using UnderAutomation.UniversalRobots;var robot = new UR();robot.Connect("192.168.0.1");robot.Rtde.OutputDataReceived += Rtde_OutputDataReceived;robot.Dashboard.LoadProgram("pick.urp");robot.Dashboard.Play();double x = robot.PrimaryInterface.CartesianInfo.X
Des centaines d'entreprises à travers le monde nous font confiance
Depuis plusieurs années, les bibliothèques fournies par UnderAutomation permettent à de petites entreprises, mais aussi à des universités et des grands groupes, de développer rapidement et à un prix abordable la couche de communication avec leurs robots.
Réussites Client
Découvrez comment nos clients intègrent les solutions de UnderAutomation dans leurs projets industriels.








Témoignages
- Universal Robots SDK
With the UnderAutomation library and the Universal Robots simulator, companies can also quickly prototype a communication layer and start developing software, for example, supervision software, even before receiving their cobot. This solution saves a significant amount of time in development and integration.
 Jocelyn PeynetDirector France at Universal Robots A/S
Jocelyn PeynetDirector France at Universal Robots A/S - Fanuc .NET SDK
The UnderAutomation Fanuc SDK gave us a production-ready Fanuc transport layer in weeks instead of months. It covers everything our virtual-commissioning users need, including numeric and position registers and IO signals, and the support from Florent has been excellent whenever we hit an edge case. It is the reason our customers can simulate full Fanuc cells against real robot controllers inside realvirtual.io.
 Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH
Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH - Fanuc .NET SDK
I've had a great experience working with UnderAutomation to integrate a UR arm into a custom .NET application. I was able to get the arm up and running MUCH faster than if I had to write my own .NET driver. There is nice documentation, with examples. The technical support has been some of the best I've experienced, in terms of quality of response and response time. Highly recommend!
 Joey LaabsEngineer at Twist Bioscience - USA
Joey LaabsEngineer at Twist Bioscience - USA - Fanuc .NET SDK
Outstanding Software with Exceptional Tech Support. We were under a tight deadline to deliver a driver for the Fanuc CRX Arm, and Under Automation SDK proved to be a game-changer. Its intuitive interface and rich feature set made development remarkably smooth, helping us meet our deadline with confidence. The technical support team was responsive and knowledgeable, providing timely assistance whenever needed. Highly recommended for anyone working in industrial automation.
 HamidLab automation engineer - USA
HamidLab automation engineer - USA - Fanuc .NET SDK
The Fanuc.NET SDK has been very helpful in developing commissioning and maintenance tools for our robots. The author is always quick to reply to any questions and concerns.
 Justin TremblayAGT Robotique - Canada
Justin TremblayAGT Robotique - Canada - Universal Robots SDK
The UnderAutomation SDK for Universal Robots proved its robustness and compatibility with the robot through continuous, high-speed synchronization. This enabled us to accelerate the development of our digital twin application. By handling the communication layer, it gave us more time to focus on operational optimization.
 Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
0
0
100k
Un SDK pour chaque marque de robot : UR, Fanuc, Yaskawa et Staubli
Plug & Play
Connectez votre robot en quelques minutes seulement. Pas de gestionnaire de license à installer, pas de clé USB. Référencez seulement la bibliothèque.
Pas de plugins à installer sur le robot
Utilisation des protocoles réseau fournis en standard par le contrôleur de robot.URCaps Motoplus PCSDK Karel ROS
Essai de 30 jours
Essayez-le gratuitement pendant 30 jours, aucun engagement, aucun enregistrement requis
Payer une fois, utiliser pour toujours
Licence perpétuelle, aucun abonnement requis, quel que soit le nombre de robots, de développeurs ou de logiciels redistribués




RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
Telnet
FTP
SNPX
RMI
Stream Motion
Ethernet/IP
Motologix
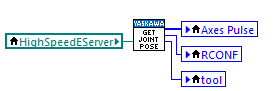
High Speed Ethernet Server (HSES)
SOAP
Oui
up to 500Hz (RTDE)
up to 100Hz (SNPX)
up to 50Hz (HSES)
up to 50Hz (SOAP)
CB-Series
e-Series
R-J3iB
R-30iA
R-30iB
YRC1000
YRC1000 micro
DX200
FS100
CS8
CS9
URSim
ROBOGUIDE
Motosim
Staubli Robotics Suite
Oui, jusqu'à 8 solutions, détection des singularités
Oui, jusqu'à 16 solutions pour les cobots CRX et 8 pour les autres
Bientôt
Oui, en ligne par SOAP
RPY / rotation vector / Matrix
,
,
,
Décompilation des fichiers de programme (* .urp) et des fichiers d'installation (* .installation)
Désérialisation des fichiers Fanuc (* .va, * .ls, * .dg, ...)
,
,
ou
1100€Pour toujours
ou
1100€Pour toujours
ou
500€Pour toujours
ou
300€Pour toujours
RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
up to 500Hz (RTDE)
CB-Series
e-Series
URSim
Oui, jusqu'à 8 solutions, détection des singularités
RPY / rotation vector / Matrix
Décompilation des fichiers de programme (* .urp) et des fichiers d'installation (* .installation)
ou
1100€Pour toujours
Encore des questions ?
Veuillez nous envoyer un message décrivant votre demande et nous vous répondrons dans les plus brefs délais.