Kommunikationsbibliotheken für Industrieroboter
Integrieren Sie Roboter von
Universal Robots, Fanuc, Yaskawa, ABB oder Staubli
ganz einfach in Ihre
.NET-, Python-, LabVIEW- oder Matlab
-Anwendungen
Toolbox • kinematische Transformation • Programmmanipulation • native Dateidekodierung
Einmal bezahlen, ewig nutzen • Technischer Support inklusive • Quellcode verfügbar

Verbinden Sie Ihren Industrieroboter in Minuten mit unserem SDK
Industrieroboter mit wenigen Zeilen C# oder Python integrieren
Vereinfachen Sie die Fernüberwachung und -steuerung Ihrer Industrieroboter mit dem von UnderAutomation entwickelten SDK (Software Development Kit). Unsere Bibliotheken sind so konzipiert, dass sie sich an jede Robotermarke anpassen lassen. Sie ermöglichen eine schnelle und intuitive Integration und erfüllen die Anforderungen sowohl von Endbenutzern als auch von Integratoren (OEM).
// C#using UnderAutomation.UniversalRobots;var robot = new UR();robot.Connect("192.168.0.1");robot.Rtde.OutputDataReceived += Rtde_OutputDataReceived;robot.Dashboard.LoadProgram("pick.urp");robot.Dashboard.Play();double x = robot.PrimaryInterface.CartesianInfo.X
Hunderte Unternehmen weltweit vertrauen darauf
Seit mehreren Jahren ermöglichen die von UnderAutomation bereitgestellten Bibliotheken kleinen Unternehmen, aber auch Universitäten und großen Konzernen, die Kommunikationsschicht für ihre Roboter schnell und kostengünstig zu entwickeln.
Kundenerfolgsgeschichten
Entdecken Sie, wie unsere Kunden UnderAutomation-Lösungen in ihre Industrieprojekte integrieren.








Erfahrungsberichte
- Universal Robots SDK
With the UnderAutomation library and the Universal Robots simulator, companies can also quickly prototype a communication layer and start developing software, for example, supervision software, even before receiving their cobot. This solution saves a significant amount of time in development and integration.
 Jocelyn PeynetDirector France at Universal Robots A/S
Jocelyn PeynetDirector France at Universal Robots A/S - Fanuc .NET SDK
The UnderAutomation Fanuc SDK gave us a production-ready Fanuc transport layer in weeks instead of months. It covers everything our virtual-commissioning users need, including numeric and position registers and IO signals, and the support from Florent has been excellent whenever we hit an edge case. It is the reason our customers can simulate full Fanuc cells against real robot controllers inside realvirtual.io.
 Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH
Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH - Fanuc .NET SDK
I've had a great experience working with UnderAutomation to integrate a UR arm into a custom .NET application. I was able to get the arm up and running MUCH faster than if I had to write my own .NET driver. There is nice documentation, with examples. The technical support has been some of the best I've experienced, in terms of quality of response and response time. Highly recommend!
 Joey LaabsEngineer at Twist Bioscience - USA
Joey LaabsEngineer at Twist Bioscience - USA - Fanuc .NET SDK
Outstanding Software with Exceptional Tech Support. We were under a tight deadline to deliver a driver for the Fanuc CRX Arm, and Under Automation SDK proved to be a game-changer. Its intuitive interface and rich feature set made development remarkably smooth, helping us meet our deadline with confidence. The technical support team was responsive and knowledgeable, providing timely assistance whenever needed. Highly recommended for anyone working in industrial automation.
 HamidLab automation engineer - USA
HamidLab automation engineer - USA - Fanuc .NET SDK
The Fanuc.NET SDK has been very helpful in developing commissioning and maintenance tools for our robots. The author is always quick to reply to any questions and concerns.
 Justin TremblayAGT Robotique - Canada
Justin TremblayAGT Robotique - Canada - Universal Robots SDK
The UnderAutomation SDK for Universal Robots proved its robustness and compatibility with the robot through continuous, high-speed synchronization. This enabled us to accelerate the development of our digital twin application. By handling the communication layer, it gave us more time to focus on operational optimization.
 Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
0
0
100k
SDK für jede Robotermarke: UR, Fanuc, Yaskawa & Staubli
Plug & Play
Verbinden Sie Ihren Roboter in nur wenigen Minuten. Kein zu installierender Lizenzmanager, kein USB-Stick. Verweisen Sie nur auf die Bibliothek.
Keine Plugins für den Roboter zu installieren
Verwendung von Netzwerkprotokollen, die vom Robotercontroller als Standard bereitgestellt werden.URCaps Motoplus PCSDK Karel ROS
30-tägige Testversion
Versuchen Sie es 30 Tage lang kostenlos, keine Verpflichtung, keine Registrierung erforderlich
Einmal bezahlen, für immer benutzen
Unbefristete Lizenz, kein Abonnement erforderlich, unabhängig von der Anzahl der Roboter, Entwickler oder weiterverteilten Software




RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
Telnet
FTP
SNPX
RMI
Stream Motion
Ethernet/IP
Motologix
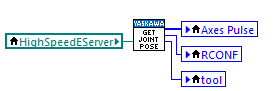
High Speed Ethernet Server (HSES)
SOAP
Ja
up to 500Hz (RTDE)
up to 100Hz (SNPX)
up to 50Hz (HSES)
up to 50Hz (SOAP)
CB-Series
e-Series
R-J3iB
R-30iA
R-30iB
YRC1000
YRC1000 micro
DX200
FS100
CS8
CS9
URSim
ROBOGUIDE
Motosim
Staubli Robotics Suite
Ja, bis zu 8 Lösungen, Erkennung von Singularitäten
Ja, bis zu 16 Lösungen für CRX Cobots und 8 für andere
Bald
Ja, online via SOAP
RPY / rotation vector / Matrix
,
,
,
Dekompilierung von Programmdateien (*.urp) und Installationsdateien (*.installation)
Deserialisierung von Fanuc -Dateien ( *.va, *.ls, *.dg, ...)
,
,
oder
1100€fürs Leben
oder
1100€fürs Leben
oder
500€fürs Leben
oder
300€fürs Leben
RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
up to 500Hz (RTDE)
CB-Series
e-Series
URSim
Ja, bis zu 8 Lösungen, Erkennung von Singularitäten
RPY / rotation vector / Matrix
Dekompilierung von Programmdateien (*.urp) und Installationsdateien (*.installation)
oder
1100€fürs Leben
Haben Sie noch Fragen?
Bitte senden Sie uns eine Nachricht mit einer Beschreibung Ihres Anliegens und wir werden uns so schnell wie möglich bei Ihnen melden.