Staubli SDK
300 (EUR) • 350 (USD)
300
€
fürs Leben180
€
für Universitäten (40 % Rabatt)Erstellen Sie schnell .NET -Anwendungen, die mit Ihrem Staubli -Industrie -Roboter kommunizieren.
.NET
Python
LabVIEW
Plug & Play
Verbinden Sie Ihren Roboter in nur wenigen Minuten. Kein zu installierender Lizenzmanager, kein USB-Stick. Verweisen Sie nur auf die Bibliothek.
Keine Plugins für den Roboter zu installieren
Verwendung von Netzwerkprotokollen, die vom Robotercontroller als Standard bereitgestellt werden.
ROS
30-tägige Testversion
Versuchen Sie es 30 Tage lang kostenlos, keine Verpflichtung, keine Registrierung erforderlich
Einmal bezahlen, für immer benutzen
Unbefristete Lizenz, kein Abonnement erforderlich, unabhängig von der Anzahl der Roboter, Entwickler oder weiterverteilten Software
Staubli Communication Library
Implementiert die nativ auf Staubli-Robotern verfügbaren Ethernet-Protokolle
100% managed assembly
Schnelle Integration mit den Controllern CS8 und CS9
Moderne, dokumentierte Bibliothek
Keine physische USB-Stick-Lizenz erforderlich
Übersicht Staubli SDK Funktionen: SOAP-Protokoll für CS8 & CS9
Bewegen Sie den Roboter
// Power on the controllerPowerReturnCode powerOnStatus = controller.Soap.SetPower(power: true);// Move linear to cartesian positionIMoveResult moveLResult = controller.Soap.MoveL(robot: 0,position,motionDesc);// Move joints to cartesian positionIMoveResult moveJCResult = controller.Soap.MoveJC(robot: 0,position,motionDesc);// Move joints to joint positionIMoveResult moveJResult = controller.Soap.MoveJJ(robot: 0,joints,motionDesc);// Move CircularIMoveResult moveCResult = controller.Soap.MoveC(robot: 0,position,position2,motionDesc);// Stop motionMotionReturnCode stopStatus = controller.Soap.StopMotion();// Reset motionMotionReturnCode resetStatus = controller.Soap.ResetMotion();// Restart motionMotionReturnCode restartStatus = controller.Soap.RestartMotion();
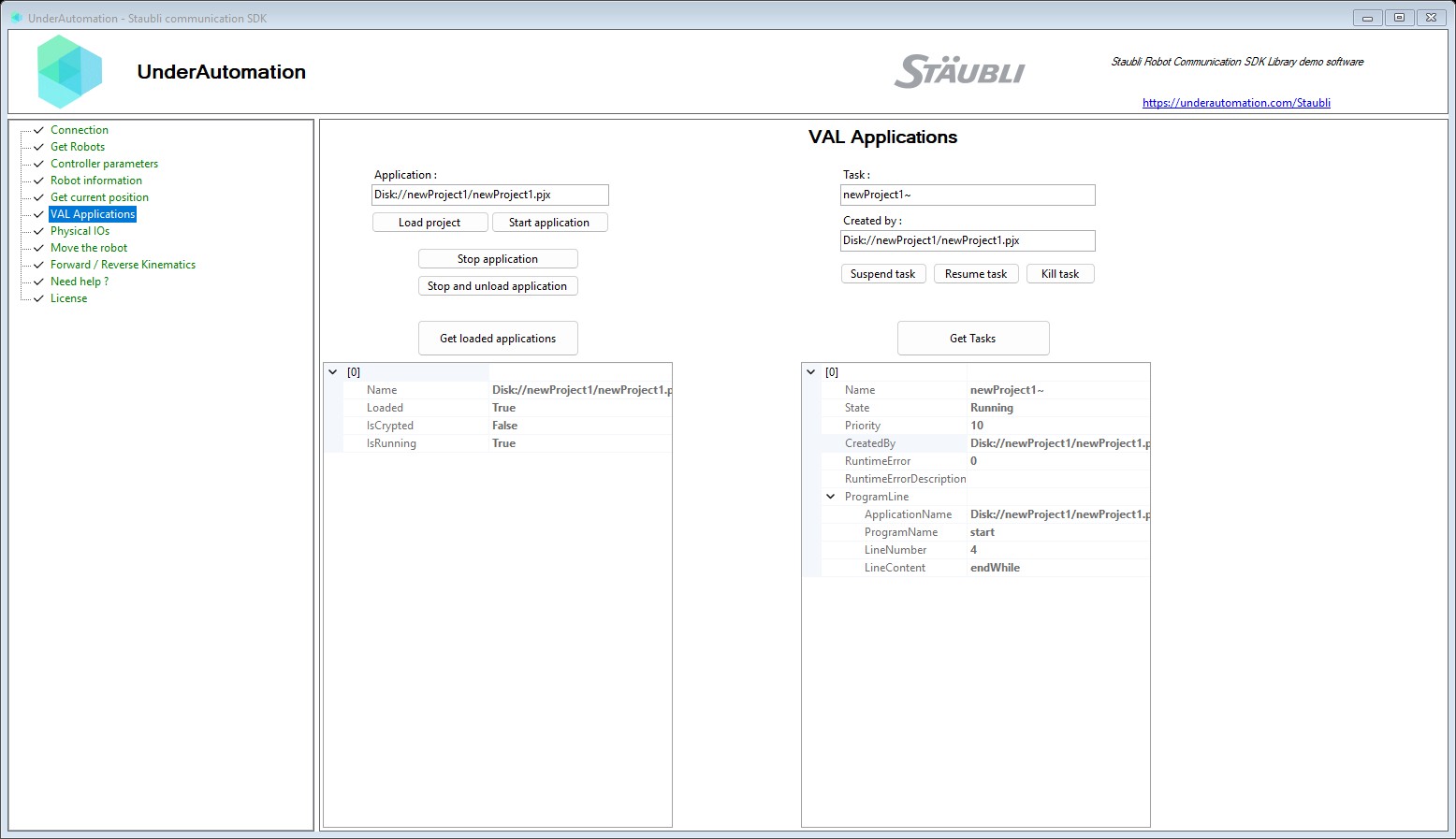
Anwendungen manipulieren
// Load project from diskcontroller.Soap.LoadProject("Disk://myProject/myProject.pjx");ValApplication[] applications = controller.Soap.GetValApplications();foreach (var application in applications)Console.WriteLine($"Application: {application.Name}, Running: {application.IsRunning}");// Unload all applicationscontroller.Soap.StopAndUnloadAll();// Stop running applicationcontroller.Soap.StopApplication();// Get tasksControllerTask[] tasks = controller.Soap.GetTasks(); // Get all tasksforeach (var task in tasks){Console.WriteLine($"Task: {task.Name}");Console.WriteLine($"reated by: {task.CreatedBy}"); // i.e. Disk://myProject/myProject.pjxConsole.WriteLine($"Line: {task.ProgramLine}");Console.WriteLine($"State: {task.State}");}// Kill taskcontroller.Soap.TaskKill(tasks[0].Name, tasks[0].CreatedBy);// Suspend taskcontroller.Soap.TaskSuspend(tasks[0].Name, tasks[0].CreatedBy);// Resume taskcontroller.Soap.TaskResume(tasks[0].Name, tasks[0].CreatedBy);
Aktuelle Position
// Get the current flange position of the first robot in world coordinatesCartesianJointPosition position = controller.Soap.GetCurrentCartesianJointPosition(robot: 0, tool: null, frame: null);double[] jointPosition1 = position.JointsPosition; // Joint position in radiansCartesianPosition cartesianPosition = position.CartesianPosition;Console.WriteLine($"X: {cartesianPosition.X}, Y: {cartesianPosition.Y}, Z: {cartesianPosition.Z}");Console.WriteLine($"Rx: {cartesianPosition.Rx}, Ry: {cartesianPosition.Ry}, Rz: {cartesianPosition.Rz}");// ---------------// Get only the current joint position of the first robotdouble[] jointPosition2 = controller.Soap.GetCurrentJointPosition(robot: 0);// ---------------// Get the joint ranges (min/max angle of each joint)controller.Soap.GetJointRange(robot: 0);
Berechnen Sie die kartesische Position aus den Winkeln der Gelenke und umgekehrt.
// Get forward kinematicsIForwardKinematics fk = controller.Soap.ForwardKinematics(robot: 0, // Index of the robot (0 for the first robot)joints // double[] of joint positions in radians);// Position matrixFrame position = fk.Position;// Position configurationConfig config = fk.Config; // i.e. Righty/Lefty, Elbow Positive/Negtive, ...// -----------------// Get inverse kinematicsIReverseKinematics ik = controller.Soap.ReverseKinematics(robot: 0, // Index of the robot (0 for the first robot)joints,position,config,range);if (ik.Result == ReversingResult.Success)foreach (double joint in ik.Joint) Console.WriteLine(joint);
Informationen
Robot[] robots = controller.Soap.GetRobots(); // Get all robots driven by the controllerforeach (var robot in robots){Console.WriteLine($"Arm: {robot.Arm}"); // i.e. TX2-140Console.WriteLine($"Mount type: {robot.MountType}"); // i.e. Floor, Ceiling, WallConsole.WriteLine($"Kinematic: {robot.Kinematic}"); // i.e. ANTHROPOMORPH6, SCARA, ...// see Robot class for more properties}// ---------------Parameter[] controllerParams = controller.Soap.GetControllerParameters(); // Get controller parametersforeach (var param in controllerParams)Console.WriteLine($"{param.Name} = {param.Value}"); // i.e. CycleTime = 0.004s// ---------------DhParameters[] dhParameters = controller.Soap.GetDhParameters(robot: 0); // Get DH parameters of the first robotforeach (var dh in dhParameters)Console.WriteLine($"{dh.Alpha} - {dh.Beta} - {dh.Theta} - {dh.A} - {dh.D}");
Eingänge / Ausgänge
// Get all physical I/O ports of the controllerPhysicalIo[] ios = controller.Soap.GetAllPhysicalIos();foreach (var io in ios){Console.WriteLine($"Name: {io.Name}");Console.WriteLine($"Type: {io.Description}");Console.WriteLine($"Lockable: {io.Lockable}"); // i.e. true, falseConsole.WriteLine($"Description: {io.TypeStr}"); // i.e. din, dout, ain, serial}// -----------------// Read I/Os valuePhysicalIoState[] values = controller.Soap.ReadIos(new[] { @"Socket\test", @"Serial\0", @"FastIO\fOut1", @"CpuUsage\val3" });foreach (var value in values){Console.WriteLine("Value: " + value.Value);Console.WriteLine("Locked: " + value.Locked);Console.WriteLine("Simulated: " + value.Simulated);}// -----------------// Write I/Os valuePhysicalIoWriteResponse[] response = controller.Soap.WriteIos(new[] { "my_io_1", "my_io_2" }, new double[] { 1.0, 0.0 });foreach (var res in response)Console.WriteLine($"Success: {res.Success} - Found: {res.Found}");
Durchsuchen Sie die Dokumentation
Herunterladen und testen


Ermöglicht Ihnen, alle Funktionen des SDK mit einer einfachen Schnittstelle zu testen. Das Beispiel wird in "Selbstgebiet" und "Einzeldatei" mit .NET 8 kompiliert. Die Anwendung ist ohne Installation tragbar.
Siehe Bedingungen und Konditionen
Angebot einholen und bestellen
Preise
Bibliotheken können kostenlos heruntergeladen und 30 Tage lang getestet werden. Nach diesem Zeitraum können Sie uns bitten, den Testzeitraum zu verlängern oder die Lizenz zu kaufen, die am besten geeignet ist: Website (nur verdeckte binäre) oder Quelle (Quellcode). Nach dem Kauf haben Sie eine einjährige Wartungszeit, mit der Sie vorrangigen Zugriff auf die Unterstützung und die Möglichkeit der Aktualisierung erhalten. Wenn Sie eine Nutzungslizenz kaufen, ist sie mit einer Robotermarke verknüpft, können Sie sie für immer verwenden, ohne wiederkehrende Gebühren, unabhängig von der Anzahl der Roboter, Entwickler oder Software, die Sie Ihren Kunden umverteilen. Wenn Sie ein Händler sind und Ihren Kunden eines unserer Produkte anbieten möchten, kontaktieren Sie uns bitte, um besondere Bedingungen und Preise zu besprechen.