Staubli SDK
300 (EUR) • 350 (USD)
$
350
평생 동안$
210
대학용 (40% 할인)스토브리 산업용 로봇과 통신하는 .NET 애플리케이션을 빠르게 만들 수 있습니다.
.NET
Python
LabVIEW
Plug & Play
단 몇 분만에 로봇을 연결하세요. 설치할 라이센스 관리자도 없고 USB 키도 없습니다. 라이브러리만 참조하세요.
로봇에 설치할 플러그인이 없습니다
로봇 컨트롤러가 표준으로 제공 한 네트워크 프로토콜 사용.
ROS
30일 평가판
30일간 무료, 약정 없음, 등록 필요 없음
한 번 지불하고 영원히 사용하십시오
로봇, 개발자 또는 재배포 된 소프트웨어에 관계없이 영구 라이센스, 구독 필요 없음
Staubli Communication Library
Staubli 로봇에서 기본적으로 사용할 수 있는 이더넷 프로토콜 구현
100% managed assembly
CS8 및 CS9 컨트롤러와의 신속한 통합
현대적이고 잘 문서화된 라이브러리
실제 USB 키 라이선스 필요 없음
Staubli SDK 기능: CS8 & CS9용 SOAP 프로토콜
로봇 이동
// Power on the controllerPowerReturnCode powerOnStatus = controller.Soap.SetPower(power: true);// Move linear to cartesian positionIMoveResult moveLResult = controller.Soap.MoveL(robot: 0,position,motionDesc);// Move joints to cartesian positionIMoveResult moveJCResult = controller.Soap.MoveJC(robot: 0,position,motionDesc);// Move joints to joint positionIMoveResult moveJResult = controller.Soap.MoveJJ(robot: 0,joints,motionDesc);// Move CircularIMoveResult moveCResult = controller.Soap.MoveC(robot: 0,position,position2,motionDesc);// Stop motionMotionReturnCode stopStatus = controller.Soap.StopMotion();// Reset motionMotionReturnCode resetStatus = controller.Soap.ResetMotion();// Restart motionMotionReturnCode restartStatus = controller.Soap.RestartMotion();
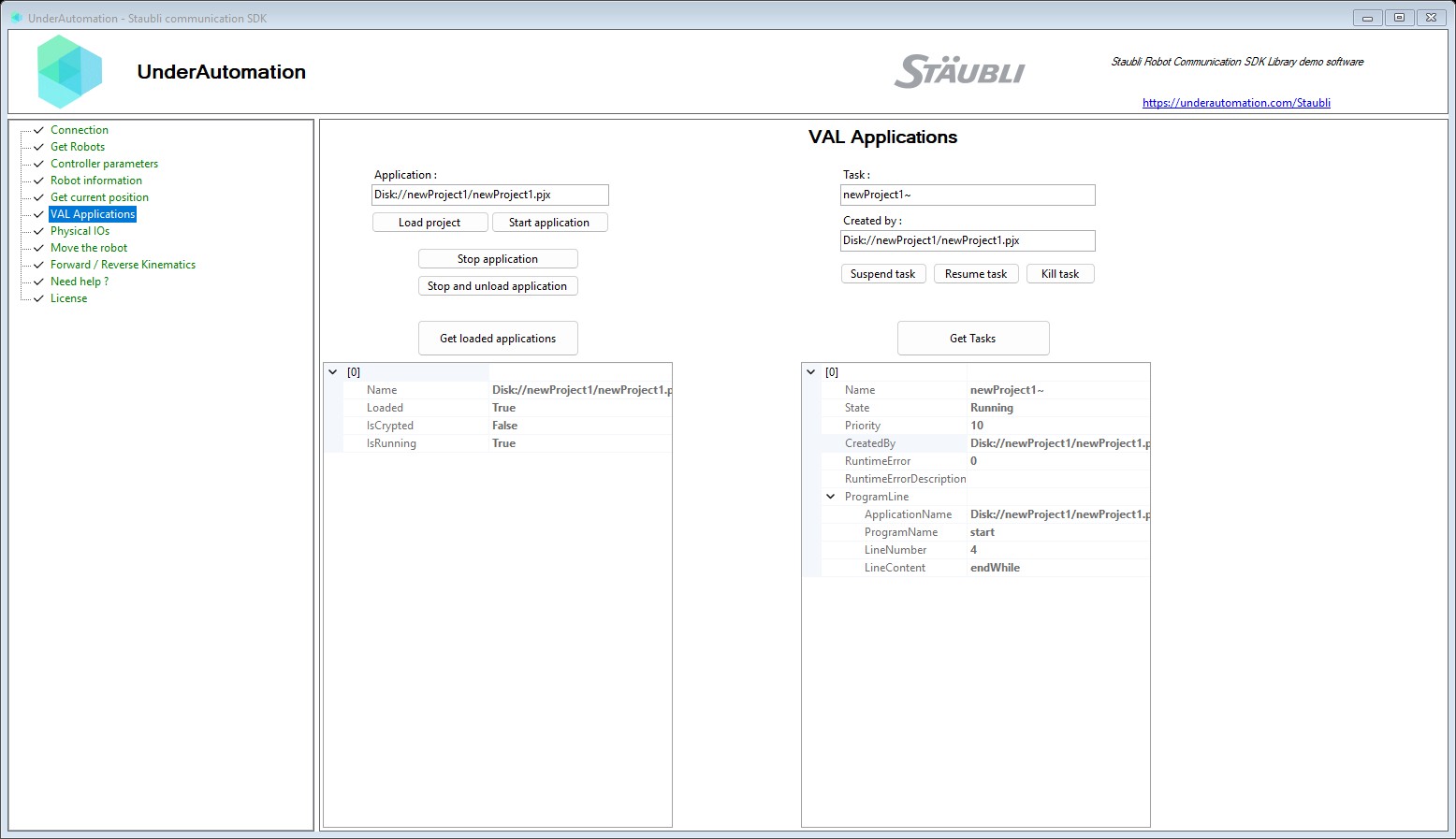
애플리케이션 처리
// Load project from diskcontroller.Soap.LoadProject("Disk://myProject/myProject.pjx");ValApplication[] applications = controller.Soap.GetValApplications();foreach (var application in applications)Console.WriteLine($"Application: {application.Name}, Running: {application.IsRunning}");// Unload all applicationscontroller.Soap.StopAndUnloadAll();// Stop running applicationcontroller.Soap.StopApplication();// Get tasksControllerTask[] tasks = controller.Soap.GetTasks(); // Get all tasksforeach (var task in tasks){Console.WriteLine($"Task: {task.Name}");Console.WriteLine($"reated by: {task.CreatedBy}"); // i.e. Disk://myProject/myProject.pjxConsole.WriteLine($"Line: {task.ProgramLine}");Console.WriteLine($"State: {task.State}");}// Kill taskcontroller.Soap.TaskKill(tasks[0].Name, tasks[0].CreatedBy);// Suspend taskcontroller.Soap.TaskSuspend(tasks[0].Name, tasks[0].CreatedBy);// Resume taskcontroller.Soap.TaskResume(tasks[0].Name, tasks[0].CreatedBy);
현재 위치
// Get the current flange position of the first robot in world coordinatesCartesianJointPosition position = controller.Soap.GetCurrentCartesianJointPosition(robot: 0, tool: null, frame: null);double[] jointPosition1 = position.JointsPosition; // Joint position in radiansCartesianPosition cartesianPosition = position.CartesianPosition;Console.WriteLine($"X: {cartesianPosition.X}, Y: {cartesianPosition.Y}, Z: {cartesianPosition.Z}");Console.WriteLine($"Rx: {cartesianPosition.Rx}, Ry: {cartesianPosition.Ry}, Rz: {cartesianPosition.Rz}");// ---------------// Get only the current joint position of the first robotdouble[] jointPosition2 = controller.Soap.GetCurrentJointPosition(robot: 0);// ---------------// Get the joint ranges (min/max angle of each joint)controller.Soap.GetJointRange(robot: 0);
조인트 각도에서 직교 위치를 계산하고 그 반대의 경우도 마찬가지입니다.
// Get forward kinematicsIForwardKinematics fk = controller.Soap.ForwardKinematics(robot: 0, // Index of the robot (0 for the first robot)joints // double[] of joint positions in radians);// Position matrixFrame position = fk.Position;// Position configurationConfig config = fk.Config; // i.e. Righty/Lefty, Elbow Positive/Negtive, ...// -----------------// Get inverse kinematicsIReverseKinematics ik = controller.Soap.ReverseKinematics(robot: 0, // Index of the robot (0 for the first robot)joints,position,config,range);if (ik.Result == ReversingResult.Success)foreach (double joint in ik.Joint) Console.WriteLine(joint);
정보
Robot[] robots = controller.Soap.GetRobots(); // Get all robots driven by the controllerforeach (var robot in robots){Console.WriteLine($"Arm: {robot.Arm}"); // i.e. TX2-140Console.WriteLine($"Mount type: {robot.MountType}"); // i.e. Floor, Ceiling, WallConsole.WriteLine($"Kinematic: {robot.Kinematic}"); // i.e. ANTHROPOMORPH6, SCARA, ...// see Robot class for more properties}// ---------------Parameter[] controllerParams = controller.Soap.GetControllerParameters(); // Get controller parametersforeach (var param in controllerParams)Console.WriteLine($"{param.Name} = {param.Value}"); // i.e. CycleTime = 0.004s// ---------------DhParameters[] dhParameters = controller.Soap.GetDhParameters(robot: 0); // Get DH parameters of the first robotforeach (var dh in dhParameters)Console.WriteLine($"{dh.Alpha} - {dh.Beta} - {dh.Theta} - {dh.A} - {dh.D}");
입력/출력
// Get all physical I/O ports of the controllerPhysicalIo[] ios = controller.Soap.GetAllPhysicalIos();foreach (var io in ios){Console.WriteLine($"Name: {io.Name}");Console.WriteLine($"Type: {io.Description}");Console.WriteLine($"Lockable: {io.Lockable}"); // i.e. true, falseConsole.WriteLine($"Description: {io.TypeStr}"); // i.e. din, dout, ain, serial}// -----------------// Read I/Os valuePhysicalIoState[] values = controller.Soap.ReadIos(new[] { @"Socket\test", @"Serial\0", @"FastIO\fOut1", @"CpuUsage\val3" });foreach (var value in values){Console.WriteLine("Value: " + value.Value);Console.WriteLine("Locked: " + value.Locked);Console.WriteLine("Simulated: " + value.Simulated);}// -----------------// Write I/Os valuePhysicalIoWriteResponse[] response = controller.Soap.WriteIos(new[] { "my_io_1", "my_io_2" }, new double[] { 1.0, 0.0 });foreach (var res in response)Console.WriteLine($"Success: {res.Success} - Found: {res.Found}");
문서 찾아보기
다운로드 및 테스트


간단한 인터페이스로 SDK의 모든 기능을 테스트 할 수 있습니다. 이 예제는 .NET 8을 사용하여 "자체 포함 된"및 "단일 파일"으로 편집되어 있습니다. 응용 프로그램은 설치없이 휴대용입니다.
일반 이용약관 보기
견적 요청 및 주문
물가
라이브러리는 무료로 다운로드 할 수 있으며 30 일 동안 테스트 할 수 있습니다. 이 기간이 지나면 시험 기간을 연장하거나 가장 적합한 라이센스를 구입하도록 요청할 수 있습니다 : 사이트 (가로 된 바이너리 전용) 또는 소스 (소스 코드). 구매 후 1 년의 유지 보수 기간이있어 지원 및 업데이트 가능성에 우선적으로 액세스 할 수 있습니다. 사용할 라이센스를 구매하면 로봇 브랜드와 연결되어 있으며 고객에게 재분배하는 로봇, 개발자 또는 소프트웨어의 수에 관계없이 반복 비용없이 영원히 사용할 수 있습니다. 유통 업체이고 고객에게 당사 제품 중 하나를 제공하려면 특별 조건과 가격에 대해 문의하십시오.