Staubli SDK
Plug & Play
わずか数分でロボットを接続できます。ライセンス マネージャーをインストールしたり、USB キーをインストールしたりする必要はありません。ライブラリのみを参照してください。
ロボットにインストールするプラグインはありません
ロボットコントローラーによって標準として提供されるネットワークプロトコルの使用。
ROS
30日間のトライアル
30日間無料で試してみてください、コミットメントなし、登録は必要ありません
一度支払い、永遠に使用してください
ロボット、開発者、または再配布されたソフトウェアの数に関係なく、永続的なライセンス、サブスクリプションは必要ありません
Staubli Communication Library
Staubliロボットでネイティブに利用可能なイーサネットプロトコルを実装します
100% managed assembly
CS8およびCS9コントローラとの迅速な統合
最新の、十分に文書化されたライブラリ
物理的なUSBキーライセンスは不要
Staubli SDK機能: CS8 & CS9用SOAPプロトコル
ロボットを移動します
// Power on the controllerPowerReturnCode powerOnStatus = controller.Soap.SetPower(power: true);// Move linear to cartesian positionIMoveResult moveLResult = controller.Soap.MoveL(robot: 0,position,motionDesc);// Move joints to cartesian positionIMoveResult moveJCResult = controller.Soap.MoveJC(robot: 0,position,motionDesc);// Move joints to joint positionIMoveResult moveJResult = controller.Soap.MoveJJ(robot: 0,joints,motionDesc);// Move CircularIMoveResult moveCResult = controller.Soap.MoveC(robot: 0,position,position2,motionDesc);// Stop motionMotionReturnCode stopStatus = controller.Soap.StopMotion();// Reset motionMotionReturnCode resetStatus = controller.Soap.ResetMotion();// Restart motionMotionReturnCode restartStatus = controller.Soap.RestartMotion();
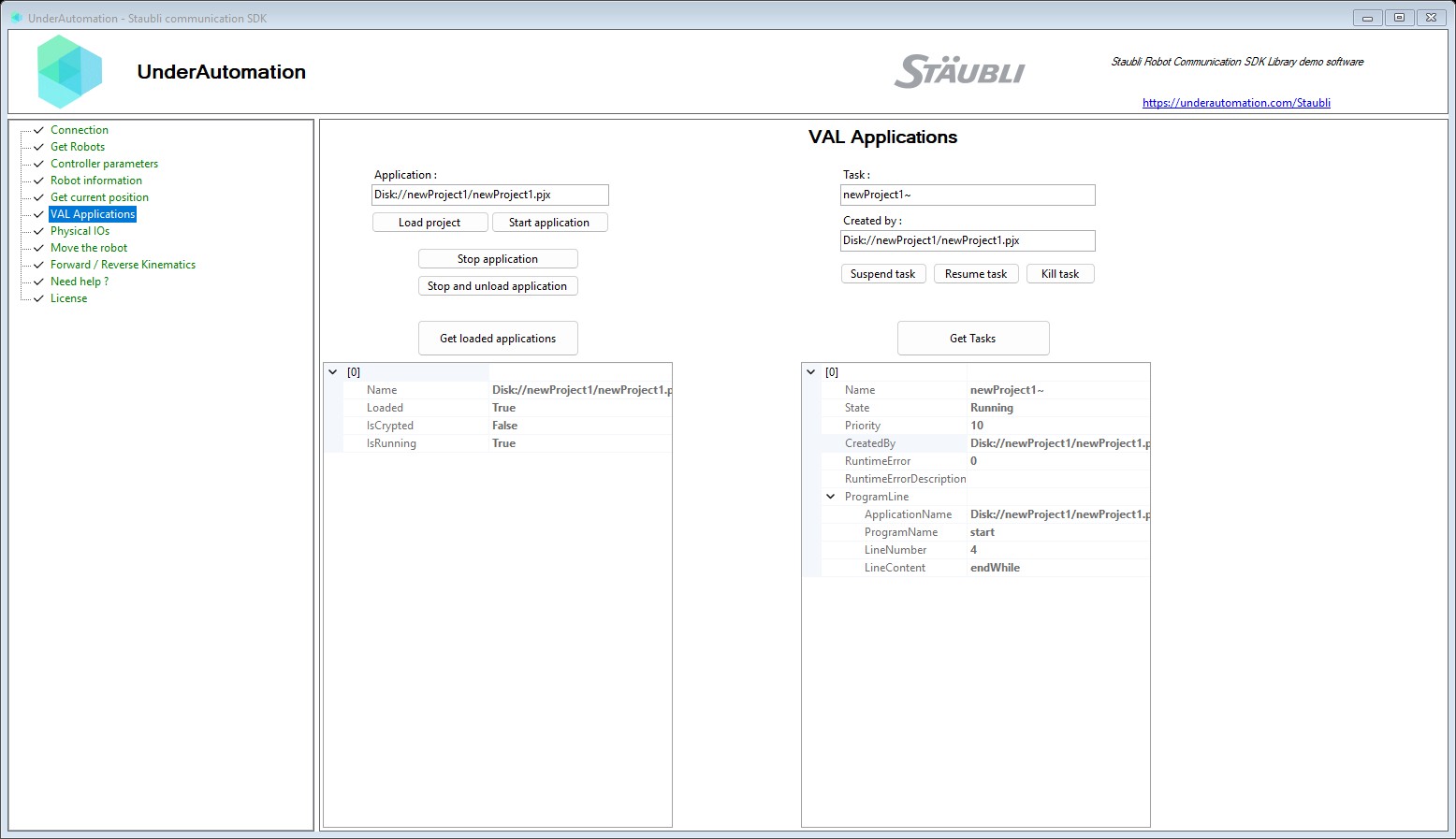
アプリケーション
// Load project from diskcontroller.Soap.LoadProject("Disk://myProject/myProject.pjx");ValApplication[] applications = controller.Soap.GetValApplications();foreach (var application in applications)Console.WriteLine($"Application: {application.Name}, Running: {application.IsRunning}");// Unload all applicationscontroller.Soap.StopAndUnloadAll();// Stop running applicationcontroller.Soap.StopApplication();// Get tasksControllerTask[] tasks = controller.Soap.GetTasks(); // Get all tasksforeach (var task in tasks){Console.WriteLine($"Task: {task.Name}");Console.WriteLine($"reated by: {task.CreatedBy}"); // i.e. Disk://myProject/myProject.pjxConsole.WriteLine($"Line: {task.ProgramLine}");Console.WriteLine($"State: {task.State}");}// Kill taskcontroller.Soap.TaskKill(tasks[0].Name, tasks[0].CreatedBy);// Suspend taskcontroller.Soap.TaskSuspend(tasks[0].Name, tasks[0].CreatedBy);// Resume taskcontroller.Soap.TaskResume(tasks[0].Name, tasks[0].CreatedBy);
現在のポジション
// Get the current flange position of the first robot in world coordinatesCartesianJointPosition position = controller.Soap.GetCurrentCartesianJointPosition(robot: 0, tool: null, frame: null);double[] jointPosition1 = position.JointsPosition; // Joint position in radiansCartesianPosition cartesianPosition = position.CartesianPosition;Console.WriteLine($"X: {cartesianPosition.X}, Y: {cartesianPosition.Y}, Z: {cartesianPosition.Z}");Console.WriteLine($"Rx: {cartesianPosition.Rx}, Ry: {cartesianPosition.Ry}, Rz: {cartesianPosition.Rz}");// ---------------// Get only the current joint position of the first robotdouble[] jointPosition2 = controller.Soap.GetCurrentJointPosition(robot: 0);// ---------------// Get the joint ranges (min/max angle of each joint)controller.Soap.GetJointRange(robot: 0);
ジョイントの角度からデカルト位置を計算し、その逆を使用します。
// Get forward kinematicsIForwardKinematics fk = controller.Soap.ForwardKinematics(robot: 0, // Index of the robot (0 for the first robot)joints // double[] of joint positions in radians);// Position matrixFrame position = fk.Position;// Position configurationConfig config = fk.Config; // i.e. Righty/Lefty, Elbow Positive/Negtive, ...// -----------------// Get inverse kinematicsIReverseKinematics ik = controller.Soap.ReverseKinematics(robot: 0, // Index of the robot (0 for the first robot)joints,position,config,range);if (ik.Result == ReversingResult.Success)foreach (double joint in ik.Joint) Console.WriteLine(joint);
インフォメーション
Robot[] robots = controller.Soap.GetRobots(); // Get all robots driven by the controllerforeach (var robot in robots){Console.WriteLine($"Arm: {robot.Arm}"); // i.e. TX2-140Console.WriteLine($"Mount type: {robot.MountType}"); // i.e. Floor, Ceiling, WallConsole.WriteLine($"Kinematic: {robot.Kinematic}"); // i.e. ANTHROPOMORPH6, SCARA, ...// see Robot class for more properties}// ---------------Parameter[] controllerParams = controller.Soap.GetControllerParameters(); // Get controller parametersforeach (var param in controllerParams)Console.WriteLine($"{param.Name} = {param.Value}"); // i.e. CycleTime = 0.004s// ---------------DhParameters[] dhParameters = controller.Soap.GetDhParameters(robot: 0); // Get DH parameters of the first robotforeach (var dh in dhParameters)Console.WriteLine($"{dh.Alpha} - {dh.Beta} - {dh.Theta} - {dh.A} - {dh.D}");
エントリ /出力
// Get all physical I/O ports of the controllerPhysicalIo[] ios = controller.Soap.GetAllPhysicalIos();foreach (var io in ios){Console.WriteLine($"Name: {io.Name}");Console.WriteLine($"Type: {io.Description}");Console.WriteLine($"Lockable: {io.Lockable}"); // i.e. true, falseConsole.WriteLine($"Description: {io.TypeStr}"); // i.e. din, dout, ain, serial}// -----------------// Read I/Os valuePhysicalIoState[] values = controller.Soap.ReadIos(new[] { @"Socket\test", @"Serial\0", @"FastIO\fOut1", @"CpuUsage\val3" });foreach (var value in values){Console.WriteLine("Value: " + value.Value);Console.WriteLine("Locked: " + value.Locked);Console.WriteLine("Simulated: " + value.Simulated);}// -----------------// Write I/Os valuePhysicalIoWriteResponse[] response = controller.Soap.WriteIos(new[] { "my_io_1", "my_io_2" }, new double[] { 1.0, 0.0 });foreach (var res in response)Console.WriteLine($"Success: {res.Success} - Found: {res.Found}");
ドキュメントを閲覧します
ダウンロードしてテストする


SDKのすべての機能を簡単なインターフェイスでテストできます。 この例は、.NET 8を使用して「Self Conted」および「Single File」でコンパイルされています。アプリケーションはインストールなしでポータブルです。
利用規約を見る
お見積り・ご注文
価格
ライブラリは無料でダウンロードでき、30日間テストできます。 この期間の後、トライアル期間を延長するように頼むか、自分に最適なライセンスを購入することができます: サイト (不明瞭なバイナリのみ) またはソース (ソースコード) 。 購入後、1年のメンテナンス期間があり、サポートへの優先アクセスと更新の可能性が得られます。 使用するライセンスを購入する場合、ロボットブランドにリンクされているため、顧客に再配布するロボット、開発者、またはソフトウェアの数に関係なく、繰り返し料金を払うことなく永久に使用できます。 あなたがディストリビューターであり、お客様に当社の製品のいずれかを提供したい場合は、特別な条件と価格について話し合うためにお問い合わせください。