Staubli SDK
300 (EUR) • 350 (USD)
300
€
Pour toujours180
€
pour les universités (40% de réduction)Créez rapidement des applications .NET qui communiquent avec votre robot industriel Staubli.
.NET
Python
LabVIEW
Plug & Play
Connectez votre robot en quelques minutes seulement. Pas de gestionnaire de license à installer, pas de clé USB. Référencez seulement la bibliothèque.
Pas de plugins à installer sur le robot
Utilisation des protocoles réseau fournis en standard par le contrôleur de robot.
ROS
Essai de 30 jours
Essayez-le gratuitement pendant 30 jours, aucun engagement, aucun enregistrement requis
Payer une fois, utiliser pour toujours
Licence perpétuelle, aucun abonnement requis, quel que soit le nombre de robots, de développeurs ou de logiciels redistribués
Staubli Communication Library
Implémente les protocoles Ethernet disponibles nativement sur les robots Staubli
100% managed assembly
Intégration rapide avec les controlleurs CS8 et CS9
Bibliothèque moderne et documentée
Aucune licence physique clé USB requise
Fonctionnalités du SDK Staubli : protocole SOAP pour CS8 & CS9
Déplacer le robot
// Power on the controllerPowerReturnCode powerOnStatus = controller.Soap.SetPower(power: true);// Move linear to cartesian positionIMoveResult moveLResult = controller.Soap.MoveL(robot: 0,position,motionDesc);// Move joints to cartesian positionIMoveResult moveJCResult = controller.Soap.MoveJC(robot: 0,position,motionDesc);// Move joints to joint positionIMoveResult moveJResult = controller.Soap.MoveJJ(robot: 0,joints,motionDesc);// Move CircularIMoveResult moveCResult = controller.Soap.MoveC(robot: 0,position,position2,motionDesc);// Stop motionMotionReturnCode stopStatus = controller.Soap.StopMotion();// Reset motionMotionReturnCode resetStatus = controller.Soap.ResetMotion();// Restart motionMotionReturnCode restartStatus = controller.Soap.RestartMotion();
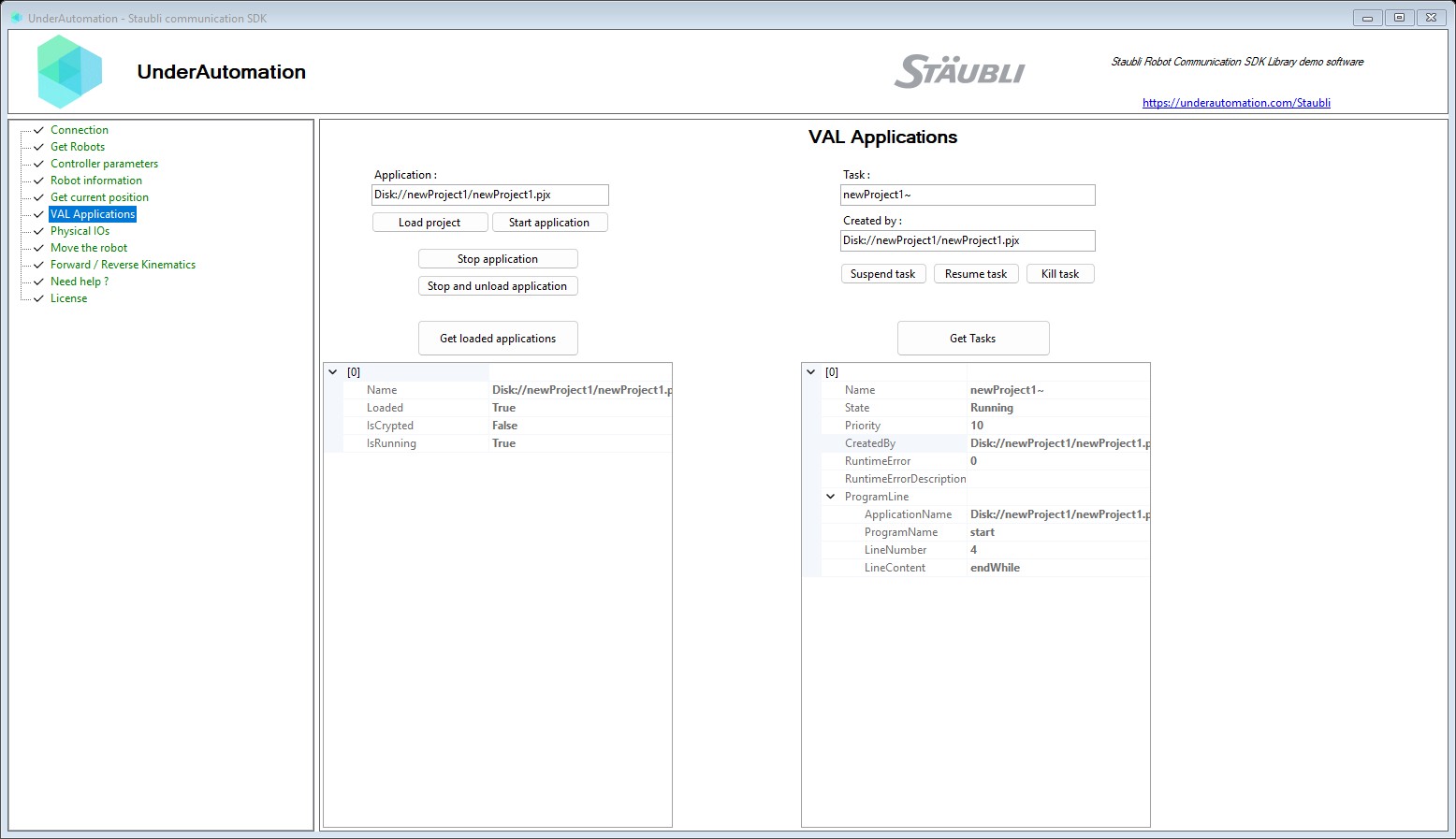
Manipuler les applications
// Load project from diskcontroller.Soap.LoadProject("Disk://myProject/myProject.pjx");ValApplication[] applications = controller.Soap.GetValApplications();foreach (var application in applications)Console.WriteLine($"Application: {application.Name}, Running: {application.IsRunning}");// Unload all applicationscontroller.Soap.StopAndUnloadAll();// Stop running applicationcontroller.Soap.StopApplication();// Get tasksControllerTask[] tasks = controller.Soap.GetTasks(); // Get all tasksforeach (var task in tasks){Console.WriteLine($"Task: {task.Name}");Console.WriteLine($"reated by: {task.CreatedBy}"); // i.e. Disk://myProject/myProject.pjxConsole.WriteLine($"Line: {task.ProgramLine}");Console.WriteLine($"State: {task.State}");}// Kill taskcontroller.Soap.TaskKill(tasks[0].Name, tasks[0].CreatedBy);// Suspend taskcontroller.Soap.TaskSuspend(tasks[0].Name, tasks[0].CreatedBy);// Resume taskcontroller.Soap.TaskResume(tasks[0].Name, tasks[0].CreatedBy);
Position actuelle
// Get the current flange position of the first robot in world coordinatesCartesianJointPosition position = controller.Soap.GetCurrentCartesianJointPosition(robot: 0, tool: null, frame: null);double[] jointPosition1 = position.JointsPosition; // Joint position in radiansCartesianPosition cartesianPosition = position.CartesianPosition;Console.WriteLine($"X: {cartesianPosition.X}, Y: {cartesianPosition.Y}, Z: {cartesianPosition.Z}");Console.WriteLine($"Rx: {cartesianPosition.Rx}, Ry: {cartesianPosition.Ry}, Rz: {cartesianPosition.Rz}");// ---------------// Get only the current joint position of the first robotdouble[] jointPosition2 = controller.Soap.GetCurrentJointPosition(robot: 0);// ---------------// Get the joint ranges (min/max angle of each joint)controller.Soap.GetJointRange(robot: 0);
Calculer la position cartésienne à partir des angles des joints et vice versa.
// Get forward kinematicsIForwardKinematics fk = controller.Soap.ForwardKinematics(robot: 0, // Index of the robot (0 for the first robot)joints // double[] of joint positions in radians);// Position matrixFrame position = fk.Position;// Position configurationConfig config = fk.Config; // i.e. Righty/Lefty, Elbow Positive/Negtive, ...// -----------------// Get inverse kinematicsIReverseKinematics ik = controller.Soap.ReverseKinematics(robot: 0, // Index of the robot (0 for the first robot)joints,position,config,range);if (ik.Result == ReversingResult.Success)foreach (double joint in ik.Joint) Console.WriteLine(joint);
Informations
Robot[] robots = controller.Soap.GetRobots(); // Get all robots driven by the controllerforeach (var robot in robots){Console.WriteLine($"Arm: {robot.Arm}"); // i.e. TX2-140Console.WriteLine($"Mount type: {robot.MountType}"); // i.e. Floor, Ceiling, WallConsole.WriteLine($"Kinematic: {robot.Kinematic}"); // i.e. ANTHROPOMORPH6, SCARA, ...// see Robot class for more properties}// ---------------Parameter[] controllerParams = controller.Soap.GetControllerParameters(); // Get controller parametersforeach (var param in controllerParams)Console.WriteLine($"{param.Name} = {param.Value}"); // i.e. CycleTime = 0.004s// ---------------DhParameters[] dhParameters = controller.Soap.GetDhParameters(robot: 0); // Get DH parameters of the first robotforeach (var dh in dhParameters)Console.WriteLine($"{dh.Alpha} - {dh.Beta} - {dh.Theta} - {dh.A} - {dh.D}");
Entrées / Sorties
// Get all physical I/O ports of the controllerPhysicalIo[] ios = controller.Soap.GetAllPhysicalIos();foreach (var io in ios){Console.WriteLine($"Name: {io.Name}");Console.WriteLine($"Type: {io.Description}");Console.WriteLine($"Lockable: {io.Lockable}"); // i.e. true, falseConsole.WriteLine($"Description: {io.TypeStr}"); // i.e. din, dout, ain, serial}// -----------------// Read I/Os valuePhysicalIoState[] values = controller.Soap.ReadIos(new[] { @"Socket\test", @"Serial\0", @"FastIO\fOut1", @"CpuUsage\val3" });foreach (var value in values){Console.WriteLine("Value: " + value.Value);Console.WriteLine("Locked: " + value.Locked);Console.WriteLine("Simulated: " + value.Simulated);}// -----------------// Write I/Os valuePhysicalIoWriteResponse[] response = controller.Soap.WriteIos(new[] { "my_io_1", "my_io_2" }, new double[] { 1.0, 0.0 });foreach (var res in response)Console.WriteLine($"Success: {res.Success} - Found: {res.Found}");
Parcourir la documentation
Télécharger et tester


Permet de tester toutes les fonctionnalités du SDK avec une interface simple. L'exemple est compilé en "Self Contained" et "Single File" avec .NET 8. L'application est portable sans installation.
Voir les conditions générales d'utilisation
Demander un devis et commander
Tarifs
Les bibliothèques sont téléchargeables gratuitement et peuvent être testées pendant 30 jours. Passé ce délai, vous pouvez nous demander de prolonger la période d'essai, ou acheter la licence qui vous convient le mieux : site (binaires obscurcis uniquement) ou source (code source). Après l'achat, vous disposez d'une période de maintenance d'un an, vous donnant un accès prioritaire au support et la possibilité de mettre à jour. Lorsque vous achetez une licence d'utilisation, elle est liée à une marque de robot, vous pouvez l'utiliser pour toujours, sans redevance récurrente, quel que soit le nombre de robot, de développeur ou de logiciel que vous redistribuez à vos clients. Si vous êtes un distributeur et souhaitez proposer à vos clients un de nos produits, merci de nous contacter pour discuter des conditions et tarifs spéciaux.