Staubli SDK
300 (EUR) • 350 (USD)
300
€
de por vida180
€
para universidades (40% de descuento)Cree rápidamente aplicaciones .NET que se comuniquen con su robot industrial Staubli.
.NET
Python
LabVIEW
Plug & Play
Conecta tu robot en tan solo unos minutos. No es necesario instalar un administrador de licencias ni una llave USB. Sólo haga referencia a la biblioteca.
No hay complementos para instalar en el robot
Uso de protocolos de red proporcionados como estándar por el controlador de robots.
ROS
Prueba de 30 días
Pruébelo gratis durante 30 días, sin compromiso, no se requiere registro
Pagar una vez, use para siempre
Licencia perpetua, no se requiere suscripción, independientemente del número de robots, desarrolladores o software redistribuido
Staubli Communication Library
Implementa los protocolos Ethernet disponibles de forma nativa en los robots Staubli
100% managed assembly
Rápida integración con los controladores CS8 y CS9
Biblioteca moderna y bien documentada
No se necesita una llave USB física
Características del SDK Staubli: protocolo SOAP para CS8 & CS9
Mover el robot
// Power on the controllerPowerReturnCode powerOnStatus = controller.Soap.SetPower(power: true);// Move linear to cartesian positionIMoveResult moveLResult = controller.Soap.MoveL(robot: 0,position,motionDesc);// Move joints to cartesian positionIMoveResult moveJCResult = controller.Soap.MoveJC(robot: 0,position,motionDesc);// Move joints to joint positionIMoveResult moveJResult = controller.Soap.MoveJJ(robot: 0,joints,motionDesc);// Move CircularIMoveResult moveCResult = controller.Soap.MoveC(robot: 0,position,position2,motionDesc);// Stop motionMotionReturnCode stopStatus = controller.Soap.StopMotion();// Reset motionMotionReturnCode resetStatus = controller.Soap.ResetMotion();// Restart motionMotionReturnCode restartStatus = controller.Soap.RestartMotion();
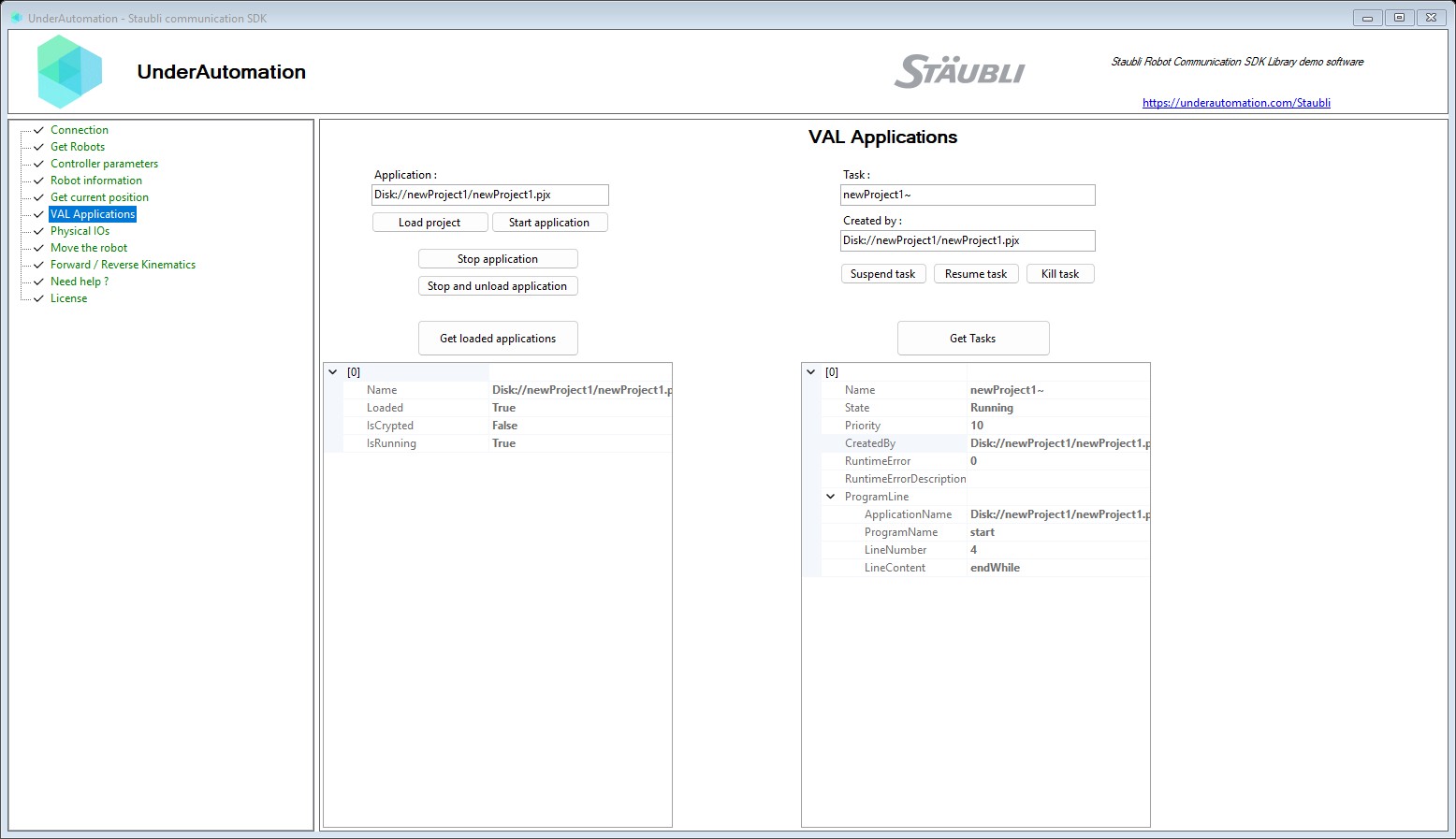
Aplicaciones de manipulación
// Load project from diskcontroller.Soap.LoadProject("Disk://myProject/myProject.pjx");ValApplication[] applications = controller.Soap.GetValApplications();foreach (var application in applications)Console.WriteLine($"Application: {application.Name}, Running: {application.IsRunning}");// Unload all applicationscontroller.Soap.StopAndUnloadAll();// Stop running applicationcontroller.Soap.StopApplication();// Get tasksControllerTask[] tasks = controller.Soap.GetTasks(); // Get all tasksforeach (var task in tasks){Console.WriteLine($"Task: {task.Name}");Console.WriteLine($"reated by: {task.CreatedBy}"); // i.e. Disk://myProject/myProject.pjxConsole.WriteLine($"Line: {task.ProgramLine}");Console.WriteLine($"State: {task.State}");}// Kill taskcontroller.Soap.TaskKill(tasks[0].Name, tasks[0].CreatedBy);// Suspend taskcontroller.Soap.TaskSuspend(tasks[0].Name, tasks[0].CreatedBy);// Resume taskcontroller.Soap.TaskResume(tasks[0].Name, tasks[0].CreatedBy);
Posición actual
// Get the current flange position of the first robot in world coordinatesCartesianJointPosition position = controller.Soap.GetCurrentCartesianJointPosition(robot: 0, tool: null, frame: null);double[] jointPosition1 = position.JointsPosition; // Joint position in radiansCartesianPosition cartesianPosition = position.CartesianPosition;Console.WriteLine($"X: {cartesianPosition.X}, Y: {cartesianPosition.Y}, Z: {cartesianPosition.Z}");Console.WriteLine($"Rx: {cartesianPosition.Rx}, Ry: {cartesianPosition.Ry}, Rz: {cartesianPosition.Rz}");// ---------------// Get only the current joint position of the first robotdouble[] jointPosition2 = controller.Soap.GetCurrentJointPosition(robot: 0);// ---------------// Get the joint ranges (min/max angle of each joint)controller.Soap.GetJointRange(robot: 0);
Calcular la posición cartesiana a partir de los ángulos articulares y viceversa.
// Get forward kinematicsIForwardKinematics fk = controller.Soap.ForwardKinematics(robot: 0, // Index of the robot (0 for the first robot)joints // double[] of joint positions in radians);// Position matrixFrame position = fk.Position;// Position configurationConfig config = fk.Config; // i.e. Righty/Lefty, Elbow Positive/Negtive, ...// -----------------// Get inverse kinematicsIReverseKinematics ik = controller.Soap.ReverseKinematics(robot: 0, // Index of the robot (0 for the first robot)joints,position,config,range);if (ik.Result == ReversingResult.Success)foreach (double joint in ik.Joint) Console.WriteLine(joint);
Información
Robot[] robots = controller.Soap.GetRobots(); // Get all robots driven by the controllerforeach (var robot in robots){Console.WriteLine($"Arm: {robot.Arm}"); // i.e. TX2-140Console.WriteLine($"Mount type: {robot.MountType}"); // i.e. Floor, Ceiling, WallConsole.WriteLine($"Kinematic: {robot.Kinematic}"); // i.e. ANTHROPOMORPH6, SCARA, ...// see Robot class for more properties}// ---------------Parameter[] controllerParams = controller.Soap.GetControllerParameters(); // Get controller parametersforeach (var param in controllerParams)Console.WriteLine($"{param.Name} = {param.Value}"); // i.e. CycleTime = 0.004s// ---------------DhParameters[] dhParameters = controller.Soap.GetDhParameters(robot: 0); // Get DH parameters of the first robotforeach (var dh in dhParameters)Console.WriteLine($"{dh.Alpha} - {dh.Beta} - {dh.Theta} - {dh.A} - {dh.D}");
Entradas / Salidas
// Get all physical I/O ports of the controllerPhysicalIo[] ios = controller.Soap.GetAllPhysicalIos();foreach (var io in ios){Console.WriteLine($"Name: {io.Name}");Console.WriteLine($"Type: {io.Description}");Console.WriteLine($"Lockable: {io.Lockable}"); // i.e. true, falseConsole.WriteLine($"Description: {io.TypeStr}"); // i.e. din, dout, ain, serial}// -----------------// Read I/Os valuePhysicalIoState[] values = controller.Soap.ReadIos(new[] { @"Socket\test", @"Serial\0", @"FastIO\fOut1", @"CpuUsage\val3" });foreach (var value in values){Console.WriteLine("Value: " + value.Value);Console.WriteLine("Locked: " + value.Locked);Console.WriteLine("Simulated: " + value.Simulated);}// -----------------// Write I/Os valuePhysicalIoWriteResponse[] response = controller.Soap.WriteIos(new[] { "my_io_1", "my_io_2" }, new double[] { 1.0, 0.0 });foreach (var res in response)Console.WriteLine($"Success: {res.Success} - Found: {res.Found}");
Examinar la documentación
Descargar y probar


Le permite probar todas las características del SDK con una interfaz simple. El ejemplo se compila en "auto contenido" y "archivo único" con .NET 8. La aplicación es portátil sin instalación.
Ver condiciones generales
Solicitud de presupuesto y pedido
Precios
Las bibliotecas se pueden descargar de forma gratuita y se pueden probar durante 30 días. Después de este período, puede solicitarnos que extendamos el período de prueba o que compren la licencia que mejor se adapte a usted: Sitio (solo binario oscurecido) o fuente (código fuente). Después de comprar, tiene un período de mantenimiento de un año, lo que le brinda acceso prioritario al soporte y la posibilidad de actualizar. Cuando compra una licencia para usar, está vinculada a una marca de robot, puede usarla para siempre, sin una tarifa recurrente, independientemente de la cantidad de robot, desarrollador o software que redistribuya a sus clientes. Si usted es un distribuidor y desea ofrecer a sus clientes uno de nuestros productos, contáctenos para discutir condiciones y precios especiales.