Yaskawa SDK
500 (EUR) • 600 (USD)
500
€
Pour toujours300
€
pour les universités (40% de réduction)Créez rapidement des applications .NET qui communiquent avec votre robot industriel Motoman Yaskawa.
.NET
Python
LabVIEW
Plug & Play
Connectez votre robot en quelques minutes seulement. Pas de gestionnaire de license à installer, pas de clé USB. Référencez seulement la bibliothèque.
Pas de plugins à installer sur le robot
Utilisation des protocoles réseau fournis en standard par le contrôleur de robot.
Motoplus ROS
Essai de 30 jours
Essayez-le gratuitement pendant 30 jours, aucun engagement, aucun enregistrement requis
Payer une fois, utiliser pour toujours
Licence perpétuelle, aucun abonnement requis, quel que soit le nombre de robots, de développeurs ou de logiciels redistribués
Fonctionnalités du SDK Yaskawa : protocole HSES et contrôle de mouvement
Déplacer le robot
// Get robot positionRobotPositionCartesianData position = robot.HighSpeedEServer.GetRobotCartesianPosition();// Move cartesianrobot.HighSpeedEServer.MoveCartesian(x: 1000,y: 10,z: 0,rx: 0,ry: 0,rz: 0,PositionCommandClassification.Cartesian_MM_S,speed: 10,PositionCommandOperationCoordinate.Robot);// Move jointsrobot.HighSpeedEServer.MoveJoints(new int[] { 1000, 0, 0, 0, 0, 0 }, PositionCommandClassification.LinkPercent, 10);
Exécuter des programmes robot
// Send Servo ONrobot.HighSpeedEServer.ServoCommand(OnOffCommandType.Servo, true);// Upload program on robotrobot.HighSpeedEServer.LoadFile("PROGRAM.JBI", File.ReadAllText("PROGRAM.JBI"));// Select job and start itrobot.HighSpeedEServer.SelectJob("PROGRAM", 1);robot.HighSpeedEServer.StartJob();// Get robot status (Play, Error, Alarming, etc.)RobotStatusData statusData = robot.HighSpeedEServer.GetStatusInformation();
Lecture et écriture de données
// Read IO 1 to 100var ioData = robot.HighSpeedEServer.ReadIO(firstIndex: 1, count: 100);// Write IO 2701 to 2704 (Network input signal)robot.HighSpeedEServer.WriteIO(2701, new byte[] { 0x01, 0x00, 0xFF, 0x00 });// Read position registers P[1] to P[4]var positionData = robot.HighSpeedEServer.ReadPositionVariable(1, 4);
Manipulation de fichiers
// List all files with extension .JBI (programs)string[] files = robot.HighSpeedEServer.GetFileList("*.JBI").Files;// Upload file to robotrobot.HighSpeedEServer.LoadFile("PROGRAM", fileContent, onLoadFileProgress);// Download file from robotrobot.HighSpeedEServer.GetFile("PROGRAM", onGetFileProgress);// Delete filerobot.HighSpeedEServer.DeleteFile("PROGRAM.JBI");
Parcourir la documentation
Télécharger et tester


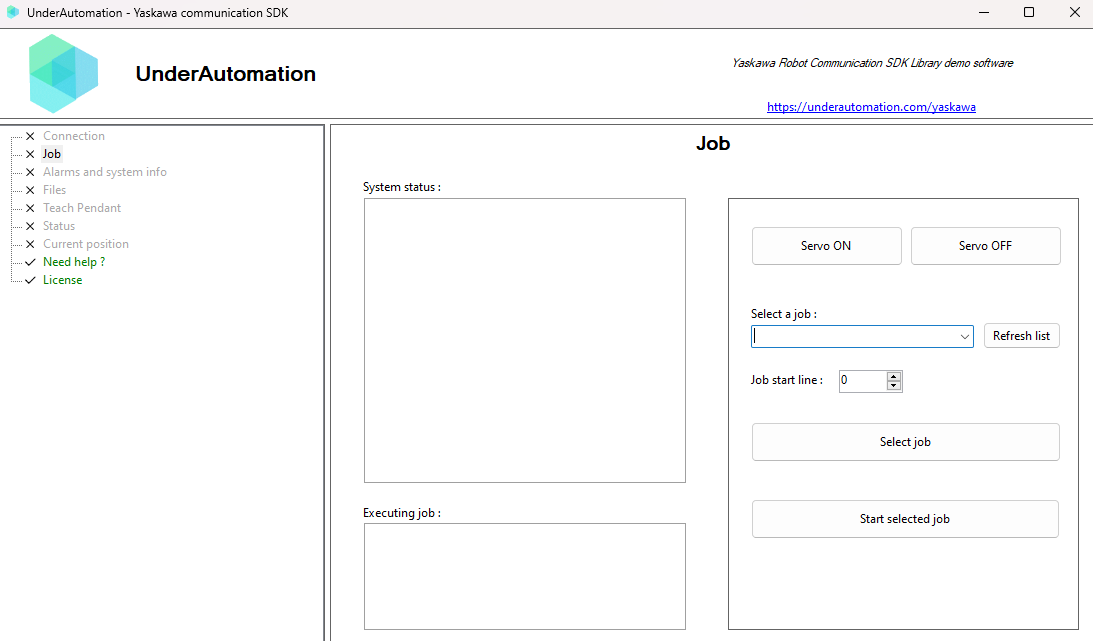
Permet de tester toutes les fonctionnalités du SDK avec une interface simple. L'exemple est compilé en "Self Contained" et "Single File" avec .NET 8. L'application est portable sans installation.
Voir les conditions générales d'utilisation
Demander un devis et commander
Tarifs
Les bibliothèques sont téléchargeables gratuitement et peuvent être testées pendant 30 jours. Passé ce délai, vous pouvez nous demander de prolonger la période d'essai, ou acheter la licence qui vous convient le mieux : site (binaires obscurcis uniquement) ou source (code source). Après l'achat, vous disposez d'une période de maintenance d'un an, vous donnant un accès prioritaire au support et la possibilité de mettre à jour. Lorsque vous achetez une licence d'utilisation, elle est liée à une marque de robot, vous pouvez l'utiliser pour toujours, sans redevance récurrente, quel que soit le nombre de robot, de développeur ou de logiciel que vous redistribuez à vos clients. Si vous êtes un distributeur et souhaitez proposer à vos clients un de nos produits, merci de nous contacter pour discuter des conditions et tarifs spéciaux.