産業用ロボット通信ライブラリ
Universal Robots、Fanuc、Yaskawa、ABB、Staubli
ロボットを
.NET、Python、LabVIEW、または Matlab
アプリケーションに簡単に統合
ツールボックス • キネマティック変換 • プログラム操作 • ネイティブ ファイル デコード
一度支払うだけで永久に使用可能 • テクニカルサポートが含まれている • ソースコードが利用可能

当社のSDKで産業用ロボットを数分で接続
数行のC#またはPythonで産業用ロボットを統合
UnderAutomation が開発した SDK (ソフトウェア開発キット) を使用して、産業用ロボットの遠隔監視と制御を簡素化します。 ロボットの各ブランドに適応するように設計された当社のライブラリは、迅速かつ直感的な統合を可能にし、エンドユーザーとインテグレーター (OEM) の両方のニーズを満たします。
// C#using UnderAutomation.UniversalRobots;var robot = new UR();robot.Connect("192.168.0.1");robot.Rtde.OutputDataReceived += Rtde_OutputDataReceived;robot.Dashboard.LoadProgram("pick.urp");robot.Dashboard.Play();double x = robot.PrimaryInterface.CartesianInfo.X
世界中の何百もの企業から信頼されています
数年来、UnderAutomationが提供するライブラリによって、小規模な企業や大学、大規模なグループでも、ロボットとの通信レイヤーを迅速かつ手頃な価格で開発できるようになった。
お客様の成功事例
当社のお客様が UnderAutomation ソリューションを産業プロジェクトにどのように統合しているかをご覧ください。








お客様の声
- Universal Robots SDK
With the UnderAutomation library and the Universal Robots simulator, companies can also quickly prototype a communication layer and start developing software, for example, supervision software, even before receiving their cobot. This solution saves a significant amount of time in development and integration.
 Jocelyn PeynetDirector France at Universal Robots A/S
Jocelyn PeynetDirector France at Universal Robots A/S - Fanuc .NET SDK
The UnderAutomation Fanuc SDK gave us a production-ready Fanuc transport layer in weeks instead of months. It covers everything our virtual-commissioning users need, including numeric and position registers and IO signals, and the support from Florent has been excellent whenever we hit an edge case. It is the reason our customers can simulate full Fanuc cells against real robot controllers inside realvirtual.io.
 Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH
Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH - Fanuc .NET SDK
I've had a great experience working with UnderAutomation to integrate a UR arm into a custom .NET application. I was able to get the arm up and running MUCH faster than if I had to write my own .NET driver. There is nice documentation, with examples. The technical support has been some of the best I've experienced, in terms of quality of response and response time. Highly recommend!
 Joey LaabsEngineer at Twist Bioscience - USA
Joey LaabsEngineer at Twist Bioscience - USA - Fanuc .NET SDK
Outstanding Software with Exceptional Tech Support. We were under a tight deadline to deliver a driver for the Fanuc CRX Arm, and Under Automation SDK proved to be a game-changer. Its intuitive interface and rich feature set made development remarkably smooth, helping us meet our deadline with confidence. The technical support team was responsive and knowledgeable, providing timely assistance whenever needed. Highly recommended for anyone working in industrial automation.
 HamidLab automation engineer - USA
HamidLab automation engineer - USA - Fanuc .NET SDK
The Fanuc.NET SDK has been very helpful in developing commissioning and maintenance tools for our robots. The author is always quick to reply to any questions and concerns.
 Justin TremblayAGT Robotique - Canada
Justin TremblayAGT Robotique - Canada - Universal Robots SDK
The UnderAutomation SDK for Universal Robots proved its robustness and compatibility with the robot through continuous, high-speed synchronization. This enabled us to accelerate the development of our digital twin application. By handling the communication layer, it gave us more time to focus on operational optimization.
 Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
0
0
100k
あらゆるロボットブランド対応SDK: UR、Fanuc、安川 & Staubli
Plug & Play
わずか数分でロボットを接続できます。ライセンス マネージャーをインストールしたり、USB キーをインストールしたりする必要はありません。ライブラリのみを参照してください。
ロボットにインストールするプラグインはありません
ロボットコントローラーによって標準として提供されるネットワークプロトコルの使用。URCaps Motoplus PCSDK Karel ROS
30日間のトライアル
30日間無料で試してみてください、コミットメントなし、登録は必要ありません
一度支払い、永遠に使用してください
ロボット、開発者、または再配布されたソフトウェアの数に関係なく、永続的なライセンス、サブスクリプションは必要ありません




RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
Telnet
FTP
SNPX
RMI
Stream Motion
Ethernet/IP
Motologix
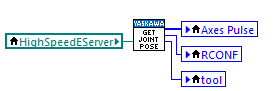
High Speed Ethernet Server (HSES)
SOAP
はい
up to 500Hz (RTDE)
up to 100Hz (SNPX)
up to 50Hz (HSES)
up to 50Hz (SOAP)
CB-Series
e-Series
R-J3iB
R-30iA
R-30iB
YRC1000
YRC1000 micro
DX200
FS100
CS8
CS9
URSim
ROBOGUIDE
Motosim
Staubli Robotics Suite
はい、最大8つのソリューション、特異点検出
はい、CRXコボットの最大16のソリューション、他の人は8ソリューションです
すぐ
はい、SOAPによるオンライン
RPY / rotation vector / Matrix
,
,
,
プログラムファイル (*.urp) とインストールファイル (*.installation) の逆コンパイル
FANUCファイルのデシリアライゼーション ( *.va、 *.ls、 *.dg、...)
,
,
または
1100€一生
または
1100€一生
または
500€一生
または
300€一生
RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
up to 500Hz (RTDE)
CB-Series
e-Series
URSim
はい、最大8つのソリューション、特異点検出
RPY / rotation vector / Matrix
プログラムファイル (*.urp) とインストールファイル (*.installation) の逆コンパイル
または
1100€一生