工业机器人通讯库
轻松将
Universal Robots、Fanuc、Yaskawa、ABB 或 Staubli
机器人集成到您的
.NET、Python、LabVIEW 或 Matlab
应用程序中
工具箱 • 运动学变换 • 程序操作 • 本机文件解码
一次付费, 永久使用 • 包含技术支持 • 提供源代码

几分钟内使用我们的 SDK 连接您的工业机器人
几行 C# 或 Python 代码即可集成工业机器人
使用 UnderAutomation 开发的 SDK (软件开发套件) 简化工业机器人的远程监督和控制。 我们的库专为适应每个品牌的机器人而设计, 可实现快速直观的集成, 满足最终用户和集成商 (OEM) 的需求。
// C#using UnderAutomation.UniversalRobots;var robot = new UR();robot.Connect("192.168.0.1");robot.Rtde.OutputDataReceived += Rtde_OutputDataReceived;robot.Dashboard.LoadProgram("pick.urp");robot.Dashboard.Play();double x = robot.PrimaryInterface.CartesianInfo.X
受到全球数百家公司的信赖
几年来, UnderAutomation提供的库使小型公司以及大学和大型集团能够快速而经济地开发与机器人的通信层。
客户成功案例
了解我们的客户如何将 UnderAutomation 解决方案集成到他们的工业项目中。








感言
- Universal Robots SDK
With the UnderAutomation library and the Universal Robots simulator, companies can also quickly prototype a communication layer and start developing software, for example, supervision software, even before receiving their cobot. This solution saves a significant amount of time in development and integration.
 Jocelyn PeynetDirector France at Universal Robots A/S
Jocelyn PeynetDirector France at Universal Robots A/S - Fanuc .NET SDK
The UnderAutomation Fanuc SDK gave us a production-ready Fanuc transport layer in weeks instead of months. It covers everything our virtual-commissioning users need, including numeric and position registers and IO signals, and the support from Florent has been excellent whenever we hit an edge case. It is the reason our customers can simulate full Fanuc cells against real robot controllers inside realvirtual.io.
 Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH
Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH - Fanuc .NET SDK
I've had a great experience working with UnderAutomation to integrate a UR arm into a custom .NET application. I was able to get the arm up and running MUCH faster than if I had to write my own .NET driver. There is nice documentation, with examples. The technical support has been some of the best I've experienced, in terms of quality of response and response time. Highly recommend!
 Joey LaabsEngineer at Twist Bioscience - USA
Joey LaabsEngineer at Twist Bioscience - USA - Fanuc .NET SDK
Outstanding Software with Exceptional Tech Support. We were under a tight deadline to deliver a driver for the Fanuc CRX Arm, and Under Automation SDK proved to be a game-changer. Its intuitive interface and rich feature set made development remarkably smooth, helping us meet our deadline with confidence. The technical support team was responsive and knowledgeable, providing timely assistance whenever needed. Highly recommended for anyone working in industrial automation.
 HamidLab automation engineer - USA
HamidLab automation engineer - USA - Fanuc .NET SDK
The Fanuc.NET SDK has been very helpful in developing commissioning and maintenance tools for our robots. The author is always quick to reply to any questions and concerns.
 Justin TremblayAGT Robotique - Canada
Justin TremblayAGT Robotique - Canada - Universal Robots SDK
The UnderAutomation SDK for Universal Robots proved its robustness and compatibility with the robot through continuous, high-speed synchronization. This enabled us to accelerate the development of our digital twin application. By handling the communication layer, it gave us more time to focus on operational optimization.
 Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
0
0
100k
适用于每个机器人品牌的 SDK: UR、Fanuc、Yaskawa 和 Staubli
Plug & Play
只需几分钟即可连接您的机器人。无需安装许可证管理器, 无需 USB 密钥。仅参考图书馆。
没有在机器人上安装的插件
使用机器人控制器作为标准提供的网络协议。URCaps Motoplus PCSDK Karel ROS
30 天试用
免费试用 30 天, 无承诺, 无需注册
付一次, 永远使用
永久许可, 无需订阅, 无论机器人, 开发人员的数量是多少




RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
Telnet
FTP
SNPX
RMI
Stream Motion
Ethernet/IP
Motologix
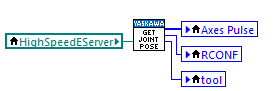
High Speed Ethernet Server (HSES)
SOAP
是的
up to 500Hz (RTDE)
up to 100Hz (SNPX)
up to 50Hz (HSES)
up to 50Hz (SOAP)
CB-Series
e-Series
R-J3iB
R-30iA
R-30iB
YRC1000
YRC1000 micro
DX200
FS100
CS8
CS9
URSim
ROBOGUIDE
Motosim
Staubli Robotics Suite
是的, 最多8个解决方案, 奇异性检测
是的, 最多16个CRX配乐解决方案, 其他解决方案8
很快
是的, 通过 SOAP 在线
RPY / rotation vector / Matrix
,
,
,
程序文件 (*.URP) 和安装文件 (*.installation) 的反编译
Fanuc文件的反序列化 ( *.va, *.ls, *.dg, ...)
,
,
或者
1100€为了一生
或者
1100€为了一生
或者
500€为了一生
或者
300€为了一生
RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
up to 500Hz (RTDE)
CB-Series
e-Series
URSim
是的, 最多8个解决方案, 奇异性检测
RPY / rotation vector / Matrix
程序文件 (*.URP) 和安装文件 (*.installation) 的反编译
或者
1100€为了一生