Get started with LabVIEW
Fanuc LabVIEW Library enables seamless integration with Fanuc robots for automation, data exchange, and remote control. Nothing to install on the controller. Compatible with LabVIEW 2010-2024.
Introduction
The library is a set of .vi files grouped under a library UnderAutomation.Fanuc.lvlib and allows you to communicate with Fanuc robots using LabVIEW.
📌 Download: 📥 UnderAutomation.Fanuc.lvlib
This library enables you to :
- 📖 Read/Write Variables: Access and modify system variables.
- 🔄 Register Control: Read/write registers for positions, numbers, and strings.
- 🎬 Program Control: Run, abort, and reset programs.
- 🔔 Alarm Management: Reset alarms and view alarm history.
- ⚡ I/O Control: Manage ports and I/O values (UI, UO, GI, GO, etc.).
- 🔍 State Monitoring: Get safety status, position, diagnostics, and more.
- 📂 File Management: Easily manipulate files.
📺 Demonstration Video
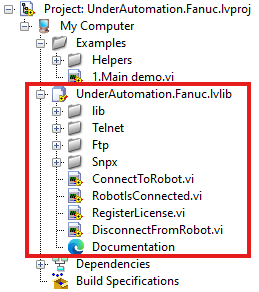
📥 Download Example Applications
Explore the Fanuc SDK with fully functional example applications for your LabVIEW version.
📌 Download: 📥 UnderAutomation.Fanuc.lvproj
📦 Github Repository
👉 The example and the library are available on GitHub.
Don't hesitate to raise an issue if you have any questions, fork to suggest improvements, and of course, ⭐ star it if you like it!
📌 Features
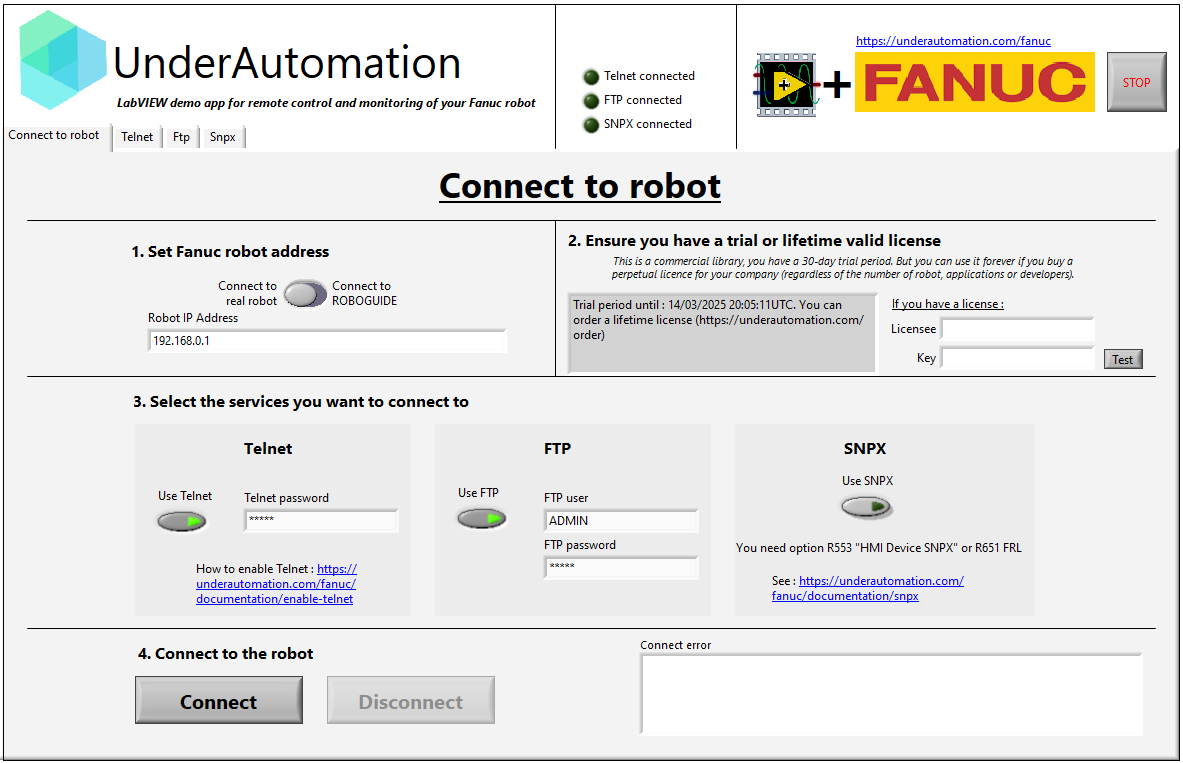
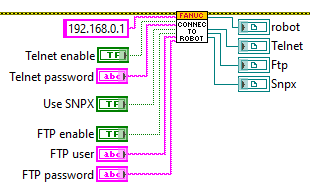
🖧 Connect to the robot
ConnectToRobot.vi allows you to connect to the robot using its IP address. Booleans enable or disable connection via Telnet, FTP and SNPX protocols. Telnet also requires a password. For FTP, you need to enter the user and password.
This VI returns an instance of the robot and of each protocol. These returned values are to be used as input to the VIs described below.
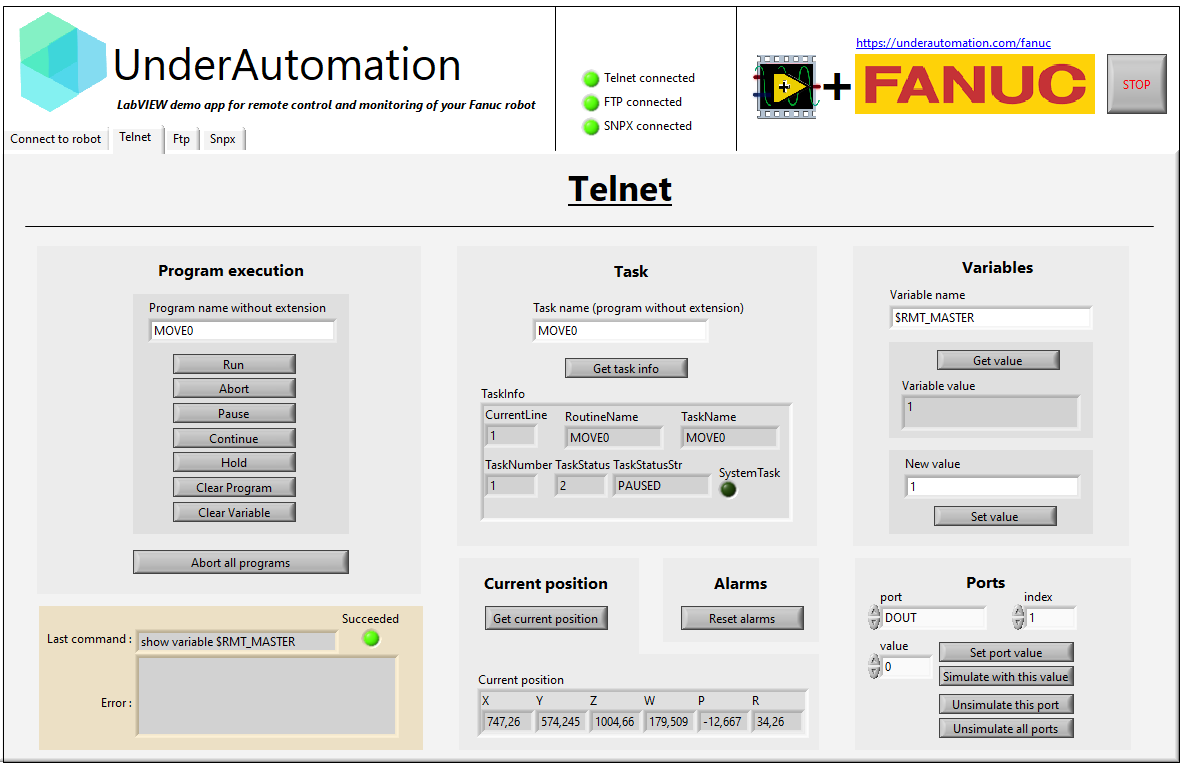
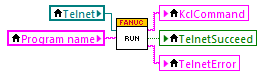
🖥️ Remote Control via Telnet KCL
Telnet KCL allows you to send commands to a Fanuc robot, such as resetting alarms, writing variables, setting an IO, and more. This feature is natively available on all Fanuc robots without requiring any additional options.
To ensure that Telnet is available on your robot or your ROBOGUIDE project, please follow this guide:
↗️ Enable TELNET on your robot
Run
To run a program, you need the following conditions :
- Set
$RMT_MASTER = 1and$REMOTE_CFG.$REMOTE_TYPE=1(you can useSetVariableValue.vi) - Turn the TP switch to off
- Reset alarms
Pause
Continue
Hold
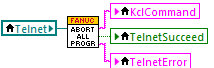
Abort
Abort all programs
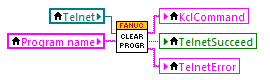
Clear program
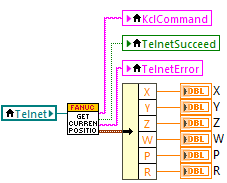
Get current position
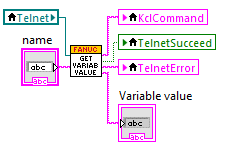
Get variable value
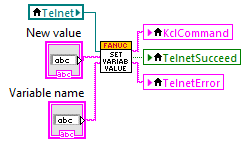
Set variable value
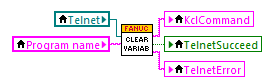
Clear variables
Reset alarms

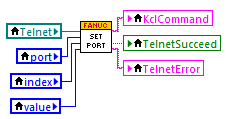
Set port
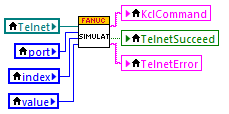
Simulate
Unsimulate
Unsimulate all
Telnet is connected
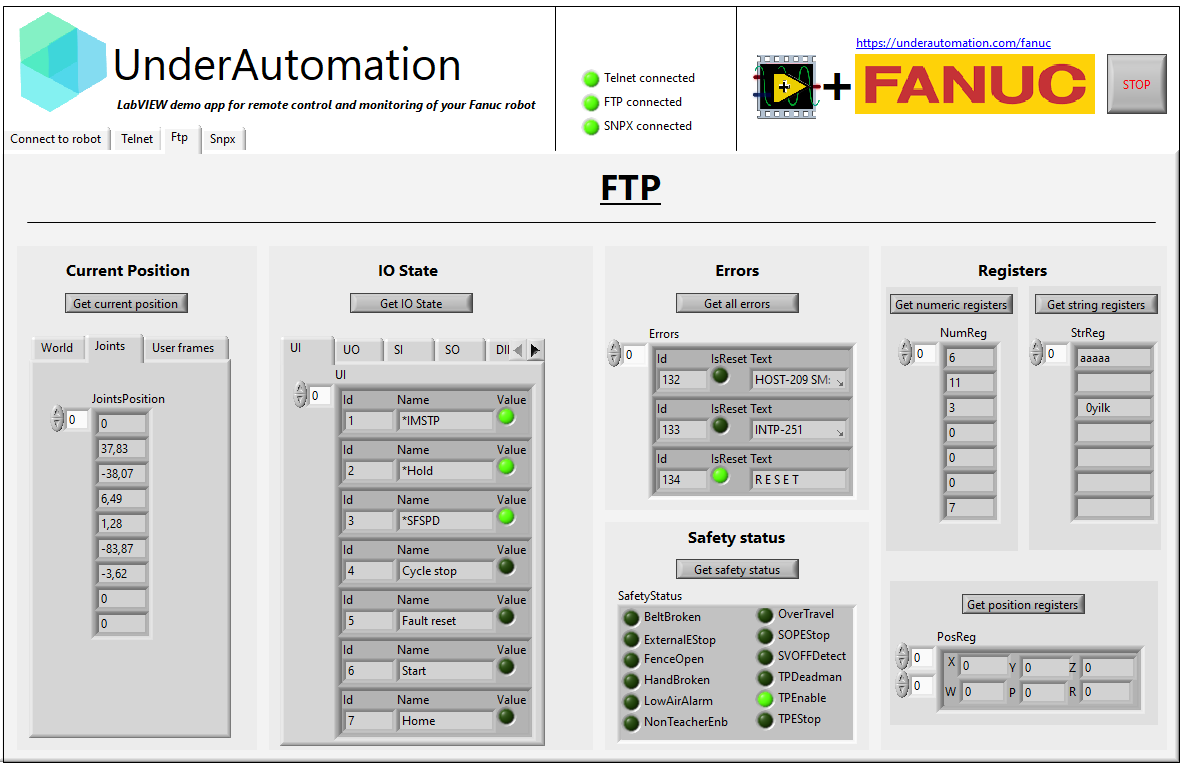
📂 File & Variable Management via FTP Memory Access
FTP (File Transfer Protocol) provides access to internal controller files, as well as fast parsing and decoding, including .va variable files and .dg diagnostic files.
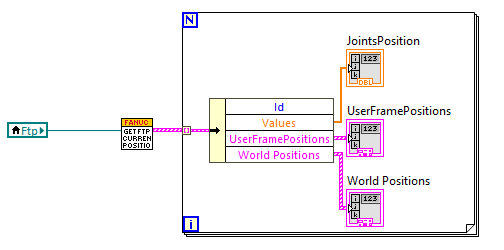
Get current position
Get IO states

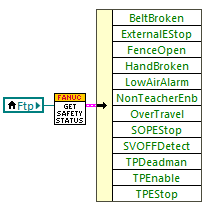
Get safety status
Get all errors list
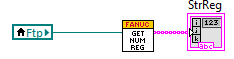
Get numeric registers
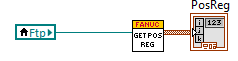
Get position registers
Get string registers
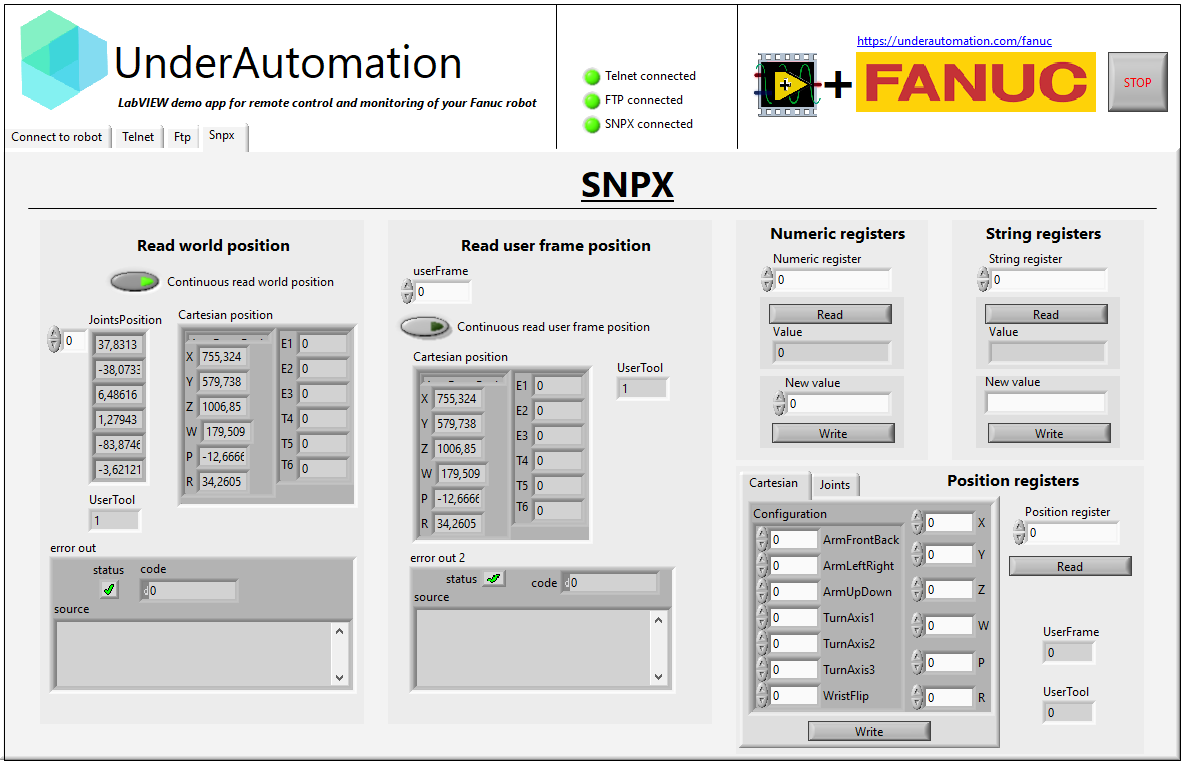
🚀 High-Speed Data Exchange via SNPX (RobotIF)
SNPX (Also known as RobotIF, Robot Interface, or SRTP) allows for quick reading and writing of data on the robot.
TCP port Robot IF Server (by default 60008) should be accessible on your controller.
To enable SNPX on your robot, you need one of the following option :
- If R650 FRA params is selected (Option "FANUC America Corp." in "Advanced" tab of ROBOGUIDE "Worcell creation wizard - Step 7 Robot options"), R553 "HMI Device SNPX" is needed.
- If R651 FRL Params is selected (Option "FANUC Ltd." in this "Advanced" tab), no option is needed.
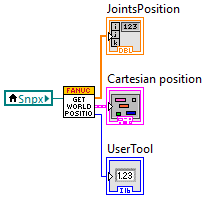
Get world position
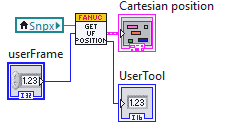
Get user frame position
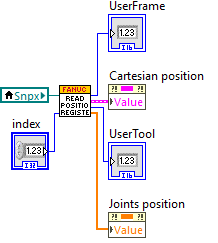
Read position register
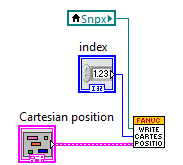
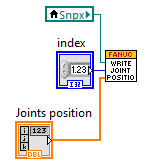
Write position register
- Write cartesian position
- Write joints position
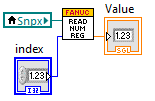
Read numeric register
Write numeric register
Read string register
Write string register
SNPX is connected
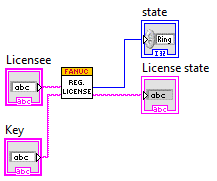
📜✅ Register License
You have 30 days free trial. For a long term use, you need to buy a license (See pricing). Then, we will send you a license key and you will just have to specify it as input of RegisterLicense.vi.
This VI must be called every time the application is started. It authorizes the call to ConnectToRobot.vi without license errors.