Fanuc SDK
1100 (EUR) • 1300 (USD)
$
1300
lifetime$
780
for universities (40% discount)Quickly create .NET applications that communicate with your Fanuc industrial robot.
.NET
Python
LabVIEW
Plug & Play
Connect your robot in just a few minutes. No license manager to install, no USB key. Only reference the library.
No plugins to install on the robot
Use of network protocols provided as standard by the robot controller.
Karel ROS
30-day trial
Try it free for 30 days, no commitment, no registration required
Pay once, use forever
Perpetual license, no subscription required, regardless of the number of robots, developers, or redistributed software
Customer Success Stories
Discover how our customers integrate UnderAutomation solutions into their industrial projects.




Fanuc SDK Features: Telnet, SNPX, FTP & Kinematics
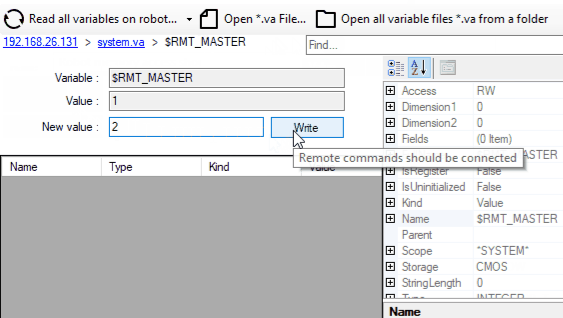
Remote commands
// Reset alarmsrobot.Telnet.Reset();// Run a programrobot.Telnet.Run("MyProgram");robot.Telnet.Pause("MyProgram");robot.Telnet.Hold("MyProgram");robot.Telnet.Continue("MyProgram");robot.Telnet.Abort("MyProgram", force: true);// Set a variablerobot.Telnet.SetVariable("$RMT_MASTER", 1);// Set an output port (example: DOUT port 2 = 0)robot.Telnet.SetPort(KCLPorts.DOUT, 2, 0);// Simulate an input port (example: DIN port 3 = 1)robot.Telnet.Simulate(KCLPorts.DIN, 3, 1);robot.Telnet.Unsimulate(KCLPorts.DIN, 3);
High-speed data reading and writing
// Read a registerPosition posReg1 = robot.Snpx.PositionRegisters.Read(1);float numReg5 = robot.Snpx.NumericRegisters.Read(5);string strReg10 = robot.Snpx.StringRegisters.Read(10);// Write a registerposReg1.CartesianPosition.X = 100;robot.Snpx.PositionRegisters.Write(1, posReg1);robot.Snpx.NumericRegisters.Write(2, 123.45f);robot.Snpx.StringRegisters.Write(3, "Hello, world!");// Read a variableint rmtMaster = robot.Snpx.IntegerSystemVariables.Read("$RMT_MASTER");string lastAlm = robot.Snpx.StringSystemVariables.Read("$ALM_IF.$LAST_ALM");Position cellFloor = robot.Snpx.PositionSystemVariables.Read("$CELL_FLOOR");// Write a system variablerobot.Snpx.IntegerSystemVariables.Write("$RMT_MASTER", 1);robot.Snpx.StringSystemVariables.Write("$ALM_IF.$LAST_ALM", "No alarms");robot.Snpx.PositionSystemVariables.Write("$CELL_FLOOR", cellFloor);// Write a Karel program variablerobot.Snpx.IntegerSystemVariables.Write("$[KarelProgram]KarelVariable", 1);// Read and Write I/O (SDI,SDO,RDI,RDO,UI,UO,SI,SO,WI,WO,WSI,PMC_K,PMC_R)robot.Snpx.RDO.Write(1, true);ushort ai5 = robot.Snpx.AI.Read(5);// Read and Write analogs (AI,AO,GI,GO,PMC_D)robot.Snpx.AO.Write(2, 5);ushort ao3 = robot.Snpx.AO.Read(3);// Clear alarmsrobot.Snpx.ClearAlarms();
File and decoding
IOState ioState = robot.Ftp.GetIOState();// Read a variablevar variableFiles = robot.Ftp.GetAllVariables();foreach (var variableFile in variableFiles)foreach (var variable in variableFile.Variables)Console.WriteLine($"{variable.Name} = {variable.Value}");// Read system variable $RMT_MASTERint remoteMode = robot.Ftp.KnownVariableFiles.GetSystemFile().RmtMaster;// Read safety statusSafetyStatus safetyStatus = robot.Ftp.GetSafetyStatus();Console.WriteLine($"Emergency Stop: {safetyStatus.ExternalEStop}");Console.WriteLine($"Teach Pendant Enabled: {safetyStatus.TPEnable}");// Get current position for each arm (Joints, World position of each tool, user frame positions)CurrentPosition currentPosition = robot.Ftp.GetCurrentPosition();// Upload a TP program to the controllerrobot.Ftp.DirectFileHandling.UploadFileToController(@"C:\Programs\MyPrg.tp", "md:/MyPrg.tp");// Download a file from the robotrobot.Ftp.DirectFileHandling.DownloadFileFromController("md:/Backup.va", @"C:\Backup\Backup.va");// Delete a file on the robotrobot.Ftp.DirectFileHandling.DeleteFile("md:/OldProgram.tp");
Inverse kinematics
// Get DH parameters// Example: CRX-10iA/LDhParameters dh = new DhParameters(-540, 150, -160, 0, 710, 0);// From a known arm modeldh = DhParameters.FromArmKinematicModel(ArmKinematicModels.CRX10iA);// From OPW parameters: M10iA/7Ldh = DhParameters.FromOpwParameters(0.15, -0.20, 0.60, 0.86, 0.10);// From an online robot (SYSMOTN file)dh = DhParameters.FromSymotnFile(robot.Ftp.KnownVariableFiles.GetSymotnFile())[0];// Forward kinematicsCartesianPosition pose = KinematicsUtils.ForwardKinematics(position, dh);// Inverse kinematics with multiple solutionsJointsPosition[] positions = KinematicsUtils.InverseKinematics(pose, dh);
Motion Interfaces
// Initialize the RMI_MOVE program on the controller.// TP must be disabled and the controller must be in AUTO mode.robot.Rmi.Initialize();// Linear motion at 100 mm/s to a Cartesian target (tool 1, frame 0)var instr = new LinearMotionTpInstruction{SpeedType = RmiLinearSpeedType.MmSec,Speed = 100,TermType = RmiTerminationType.Fine,Target = new CartesianPositionWithUserFrame(500, 200, 300, 0, 90, 0, tool: 1, frame: 0)};RmiInstructionResponse r = robot.Rmi.SendTpInstruction(instr);// Wait for the controller to confirm the motion completedr.WaitForCompletion();if (r.Status == RmiInstructionStatus.Error)System.Console.WriteLine("Error: " + r.ErrorText);// Abort when done — always end the session with Abort() or Disconnect()robot.Rmi.Abort();robot.Disconnect();
Offline tools
// Parse a variable file and extract a hierarchical list of variablesGenericVariableFile vaFile = FanucFileReaders.VariableReader.ReadFile("C:/path/to/variable.va", Languages.English);foreach (var variable in vaFile.Variables)Console.WriteLine($"{variable.Name} = {variable.Value} [{variable.Type}]");// Edit and regenerate the variable filevaFile.GenerateVa("C:/path/to/variable_modified.va\"");// Parse several types of filesFanucFileReaders.ErrorListReader.ReadFile("C:/path/to/errall.ls", Languages.English);FanucFileReaders.IOStateReader.ReadFile("C:/path/to/iostate.dg", Languages.English);FanucFileReaders.SafetyStatusReader.ReadFile("C:/path/to/safety.dg", Languages.English);FanucFileReaders.CurrentPositionReader.ReadFile("C:/path/to/curpos.dg", Languages.English);
Browse the documentation
Guides and how-to articles
The SDK covers the main features of Fanuc robots through several native Ethernet protocols. Depending on the options installed on your controller and its generation, some protocols may or may not be available. Each article below explains how to perform a specific task and compares the different approaches.
Download and test


Allows you to test all the features of the SDK with a simple interface. The example is compiled in "self contained" and "single file" with .NET 8. The application is portable without installation.
See terms and conditions

Request a quote and order
Pricing
Libraries can be downloaded for free and can be tested for 30 days. After this period, you can ask us to extend the trial period, or buy the license that suits you best: standard, pro or source. After purchasing, you have a maintenance period, giving you access to the support and the possibility of updating. When you buy a license to use, it is linked to a robot brand, you can use it forever, without recurring fee, regardless of the number of robot, developer or software that you redistribute to your customers. If you are a distributor and wish to offer your customers one of our products, please contact us to discuss special conditions and prices.