Industrial robots communication libraries
Easily integrate
Universal Robots, Fanuc, Yaskawa, ABB or Staubli
robots into your
.NET, Python, LabVIEW or Matlab
applications
Toolbox • kinematic transformation • program manipulation • native file decoding
Pay once, use forever • Technical support included • Source code available

Connect Your Industrial Robot in Minutes with Our SDK
Integrate Industrial Robots with a Few Lines of C# or Python
Simplify remote supervision and control of your industrial robots using the SDK (Software Development Kit) developed by UnderAutomation. Designed to adapt to each brand of robot, our libraries allow rapid and intuitive integration, meeting the needs of both end users and integrators (OEM).
// C#using UnderAutomation.UniversalRobots;var robot = new UR();robot.Connect("192.168.0.1");robot.Rtde.OutputDataReceived += Rtde_OutputDataReceived;robot.Dashboard.LoadProgram("pick.urp");robot.Dashboard.Play();double x = robot.PrimaryInterface.CartesianInfo.X
Trusted by hundreds Companies Worldwide
For several years, libraries supplied by UnderAutomation have enabled small companies, universities and large corporations to develop the communication layer with their robots quickly and affordably.
Customer Success Stories
Discover how our customers integrate UnderAutomation solutions into their industrial projects.









Testimonials
- Universal Robots SDK
With the UnderAutomation library and the Universal Robots simulator, companies can also quickly prototype a communication layer and start developing software, for example, supervision software, even before receiving their cobot. This solution saves a significant amount of time in development and integration.
 Jocelyn PeynetDirector France at Universal Robots A/S
Jocelyn PeynetDirector France at Universal Robots A/S - Fanuc .NET SDK
The UnderAutomation Fanuc SDK gave us a production-ready Fanuc transport layer in weeks instead of months. It covers everything our virtual-commissioning users need, including numeric and position registers and IO signals, and the support from Florent has been excellent whenever we hit an edge case. It is the reason our customers can simulate full Fanuc cells against real robot controllers inside realvirtual.io.
 Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH
Dr.-Ing. Thomas StriglFounder and CEO, realvirtual GmbH - Fanuc .NET SDK
I've had a great experience working with UnderAutomation to integrate a UR arm into a custom .NET application. I was able to get the arm up and running MUCH faster than if I had to write my own .NET driver. There is nice documentation, with examples. The technical support has been some of the best I've experienced, in terms of quality of response and response time. Highly recommend!
 Joey LaabsEngineer at Twist Bioscience - USA
Joey LaabsEngineer at Twist Bioscience - USA - Fanuc .NET SDK
Outstanding Software with Exceptional Tech Support. We were under a tight deadline to deliver a driver for the Fanuc CRX Arm, and Under Automation SDK proved to be a game-changer. Its intuitive interface and rich feature set made development remarkably smooth, helping us meet our deadline with confidence. The technical support team was responsive and knowledgeable, providing timely assistance whenever needed. Highly recommended for anyone working in industrial automation.
 HamidLab automation engineer - USA
HamidLab automation engineer - USA - Fanuc .NET SDK
The Fanuc.NET SDK has been very helpful in developing commissioning and maintenance tools for our robots. The author is always quick to reply to any questions and concerns.
 Justin TremblayAGT Robotique - Canada
Justin TremblayAGT Robotique - Canada - Universal Robots SDK
The UnderAutomation SDK for Universal Robots proved its robustness and compatibility with the robot through continuous, high-speed synchronization. This enabled us to accelerate the development of our digital twin application. By handling the communication layer, it gave us more time to focus on operational optimization.
 Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
Jérôme Gervais LavoieCNIMI - Drummondville, Quebec, Canada
0
0
100k
SDK for Every Robot Brand: UR, Fanuc, Yaskawa & Staubli
Plug & Play
Connect your robot in just a few minutes. No license manager to install, no USB key. Only reference the library.
No plugins to install on the robot
Use of network protocols provided as standard by the robot controller.URCaps Motoplus PCSDK Karel ROS
30-day trial
Try it free for 30 days, no commitment, no registration required
Pay once, use forever
Perpetual license, no subscription required, regardless of the number of robots, developers, or redistributed software




RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
Telnet
FTP
SNPX
RMI
Stream Motion
Ethernet/IP
Motologix
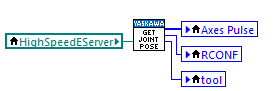
High Speed Ethernet Server (HSES)
SOAP
Yes
up to 500Hz (RTDE)
up to 100Hz (SNPX)
up to 50Hz (HSES)
up to 50Hz (SOAP)
CB-Series
e-Series
R-J3iB
R-30iA
R-30iB
YRC1000
YRC1000 micro
DX200
FS100
CS8
CS9
URSim
ROBOGUIDE
Motosim
Staubli Robotics Suite
Yes, up to 8 solutions, singularities detection
Yes, up to 16 solutions for CRX cobots and 8 for others
Soon
Yes, online by SOAP
RPY / rotation vector / Matrix
,
,
,
Decompilation of program files (*.urp) and installation files (*.installation)
Deserialization of Fanuc files (*.va, *.ls, *.dg, ...)
,
,
or
1100€lifetime
or
1100€lifetime
or
500€lifetime
or
300€lifetime
RTDE
Dashboard Server
Primary Interface
SSH
SFTP
Interpreter Mode
Socket
up to 500Hz (RTDE)
CB-Series
e-Series
URSim
Yes, up to 8 solutions, singularities detection
RPY / rotation vector / Matrix
Decompilation of program files (*.urp) and installation files (*.installation)
or
1100€lifetime
Still have questions ?
Please send us a message describing your request and we will get back to you as soon as possible.