Download
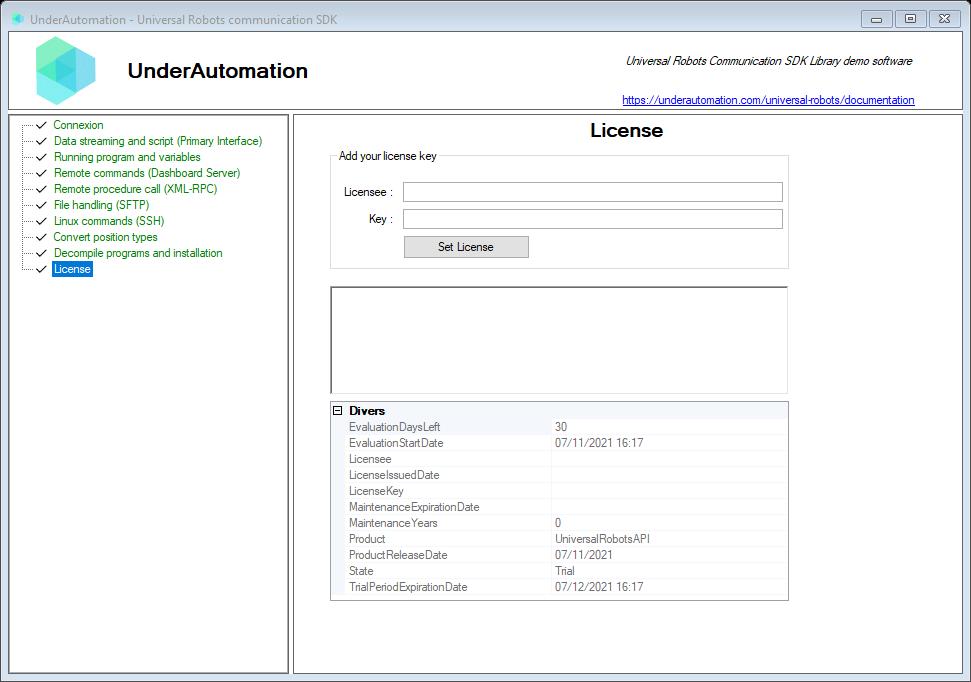
This SDK (Software Development Kit) is subject to licensing. You have 30 days to try it.
Download via NuGet

Examples on GitHub
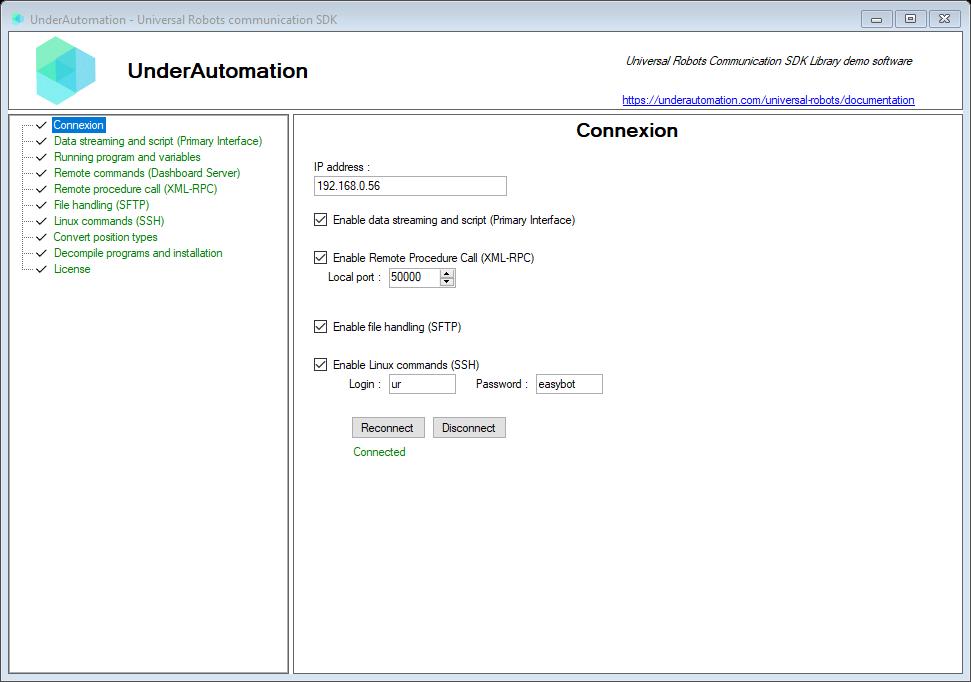
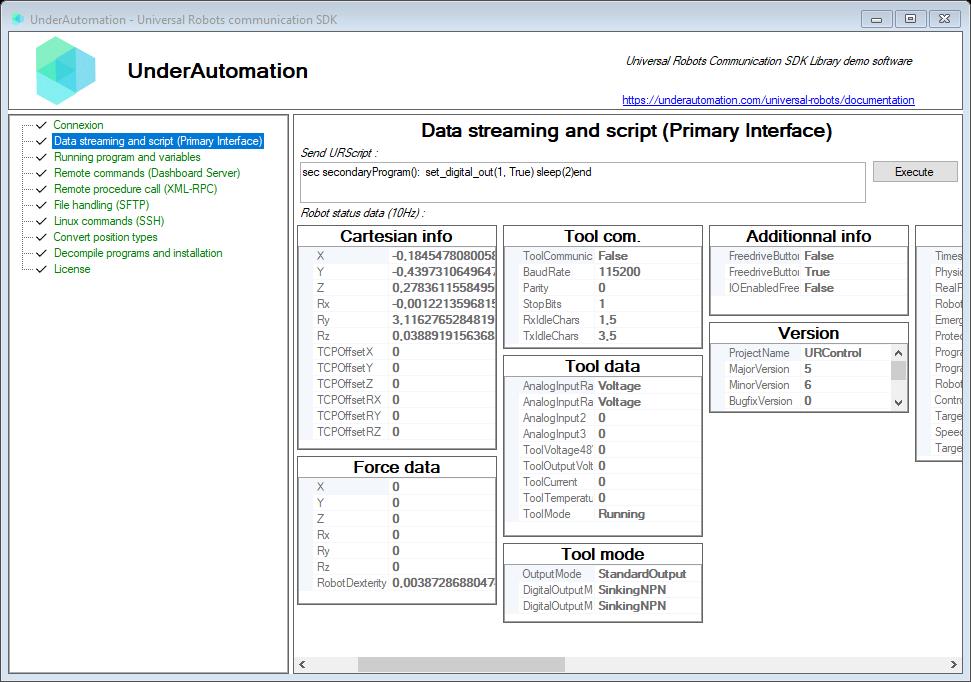
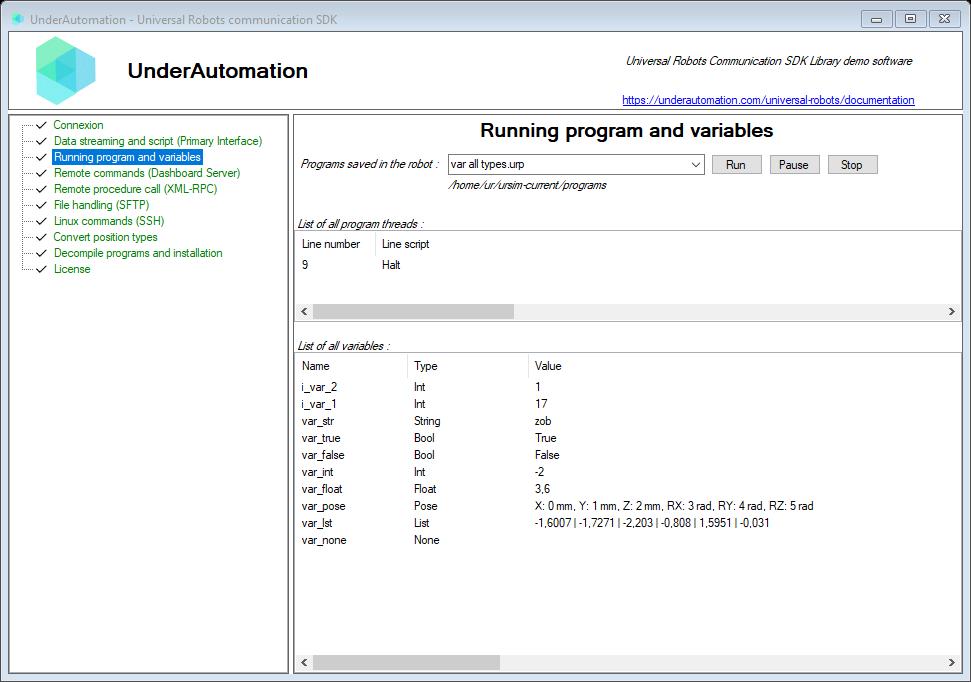
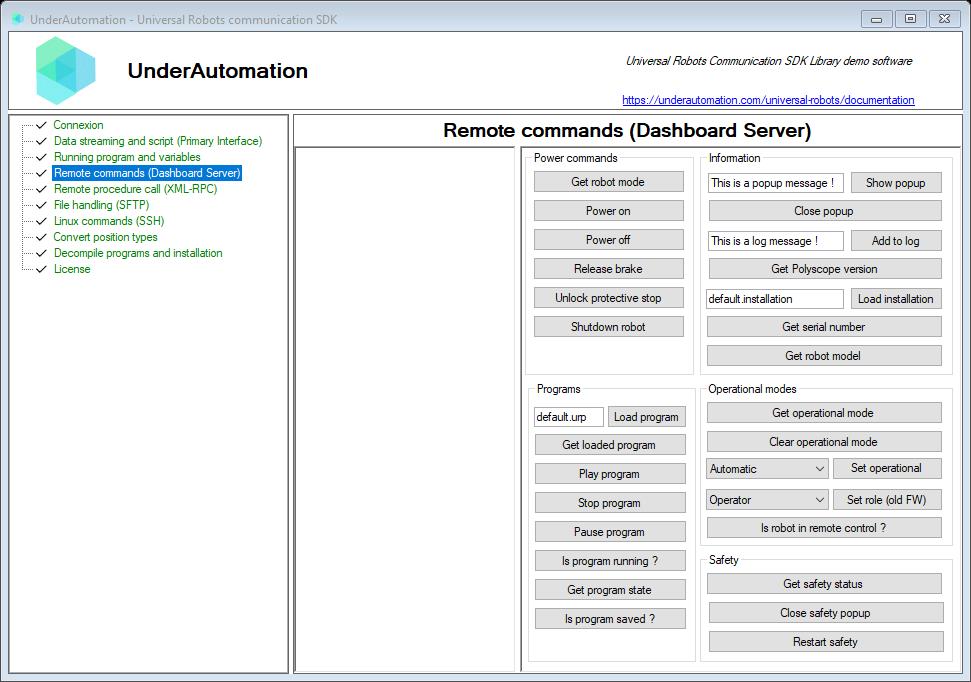
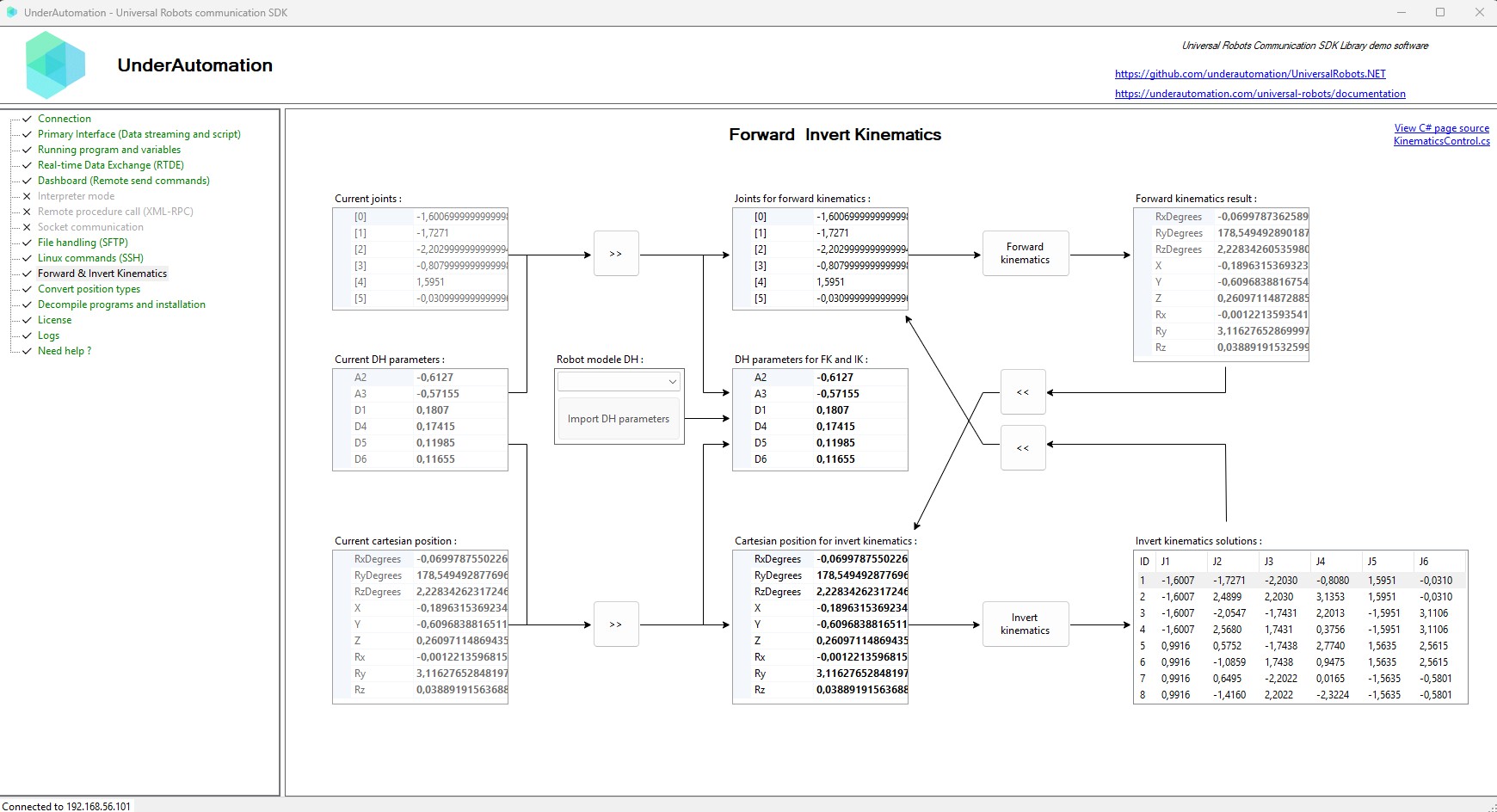
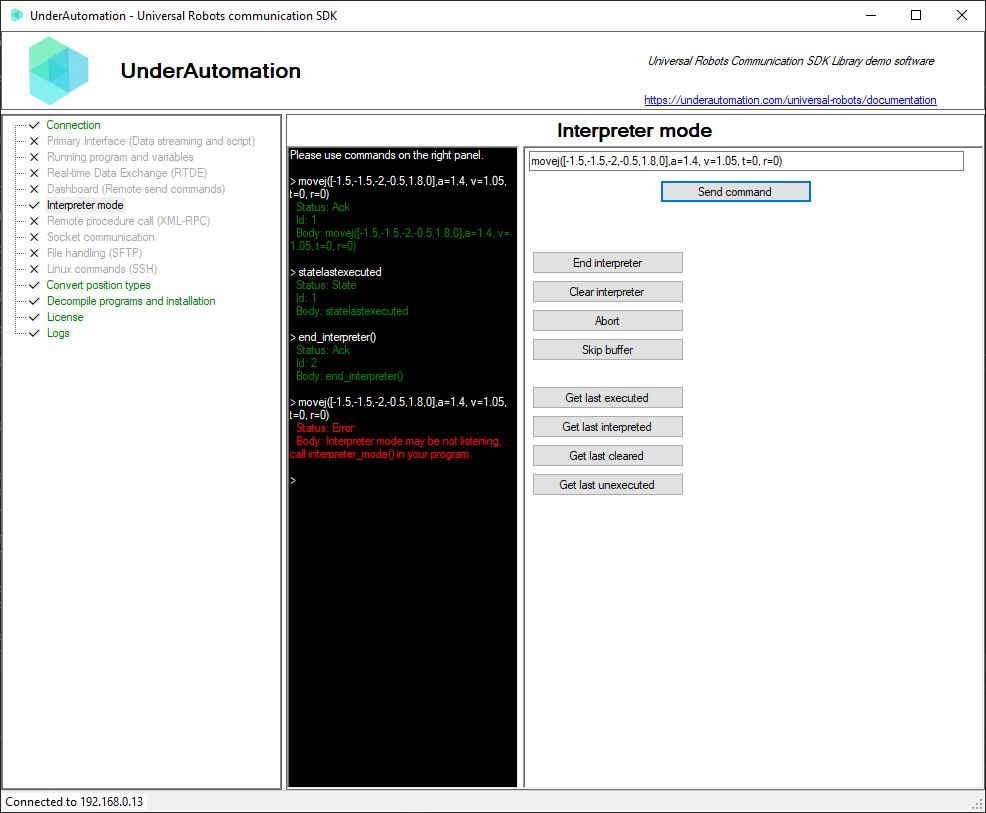
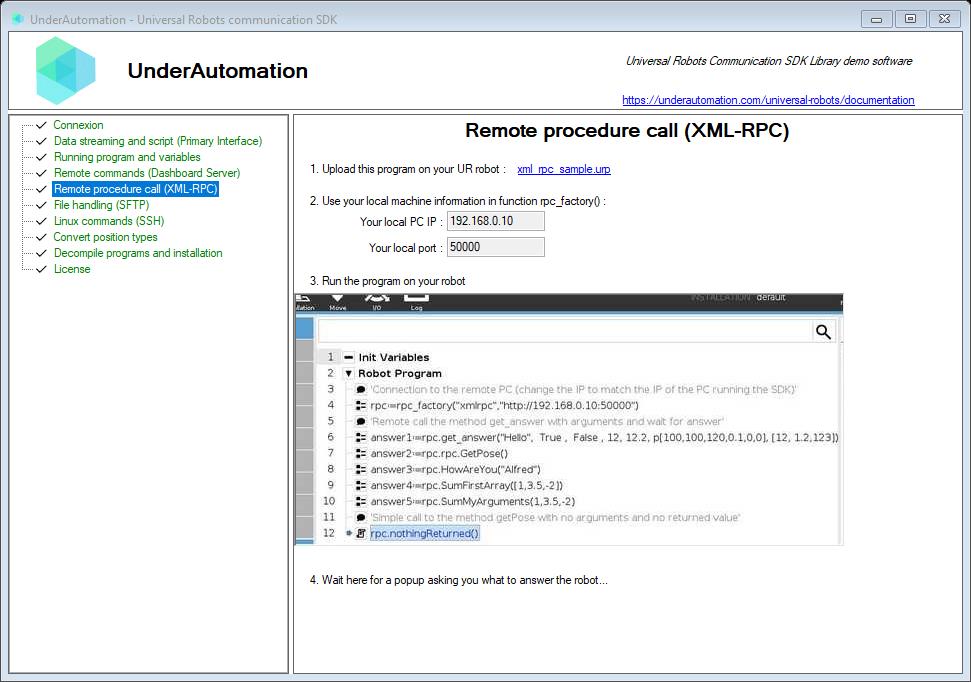
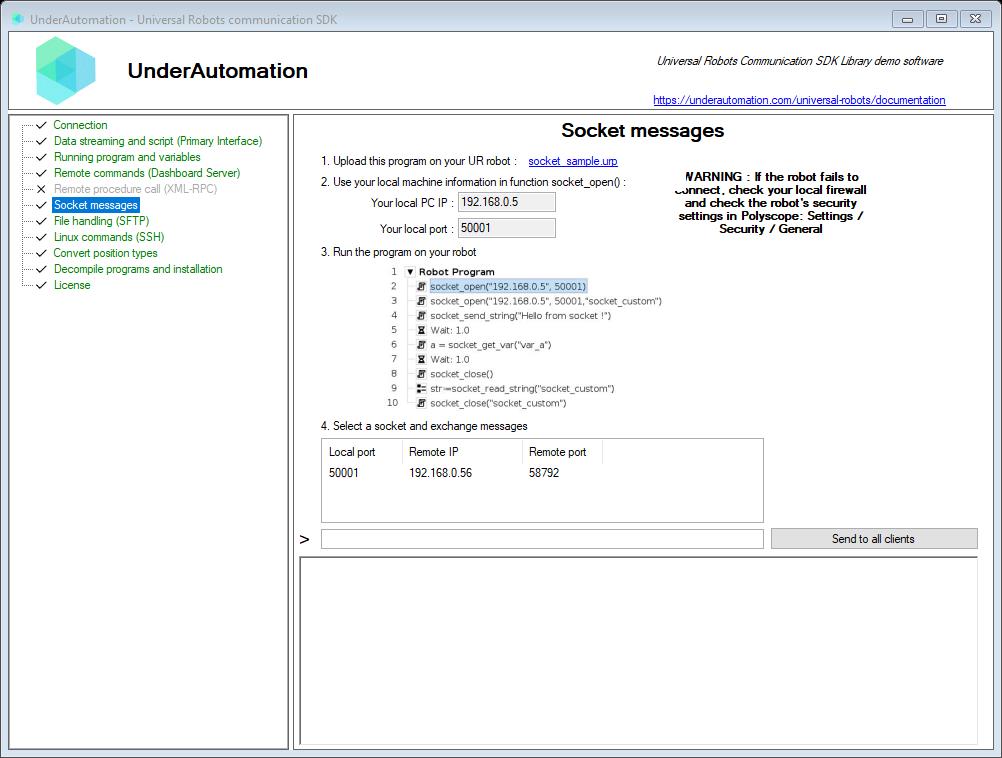
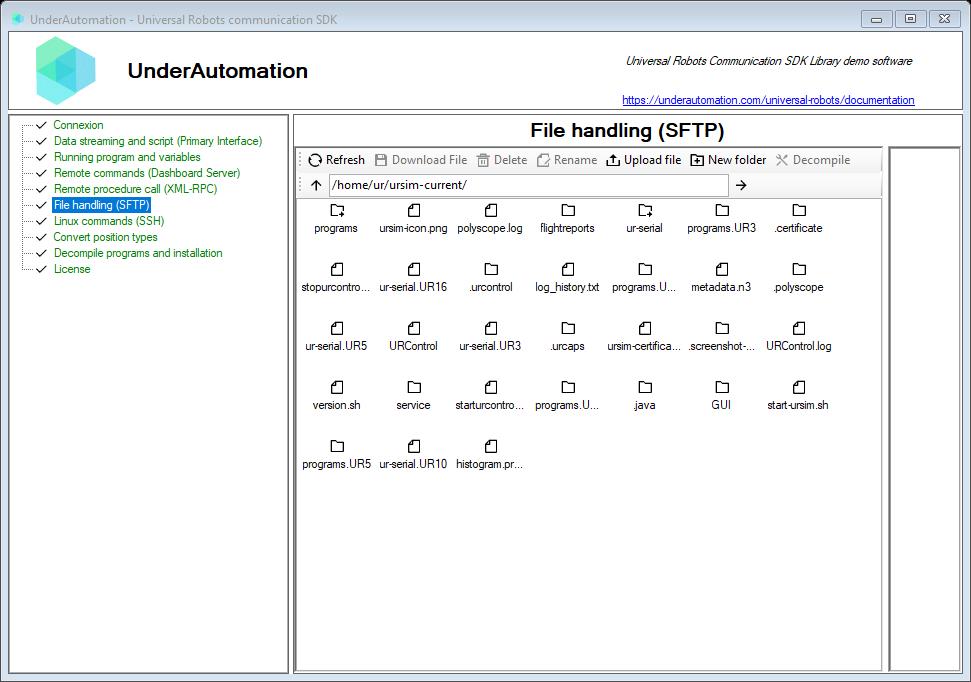
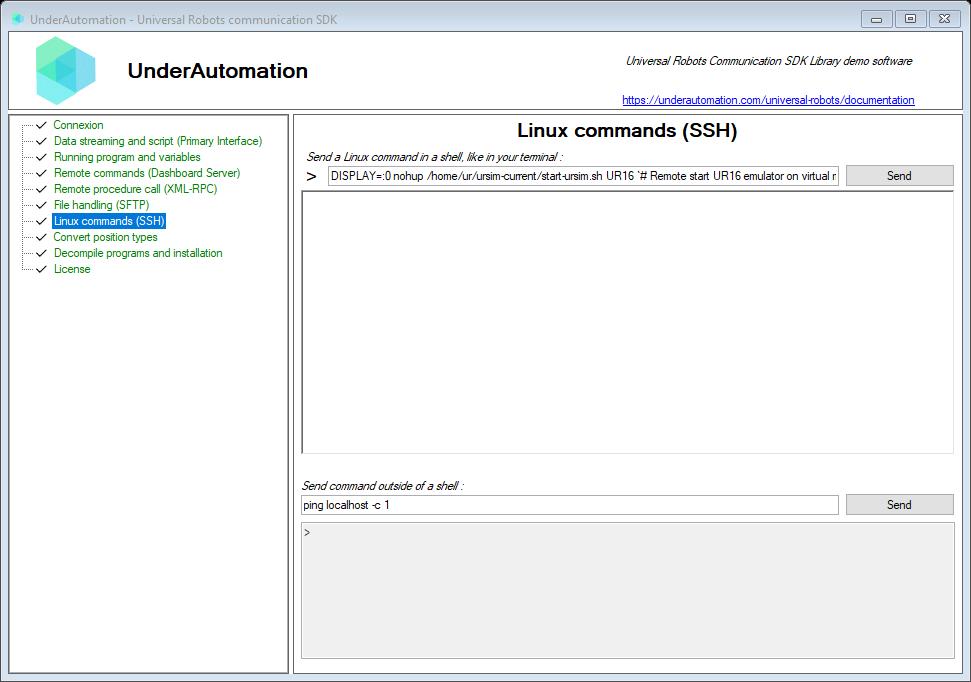
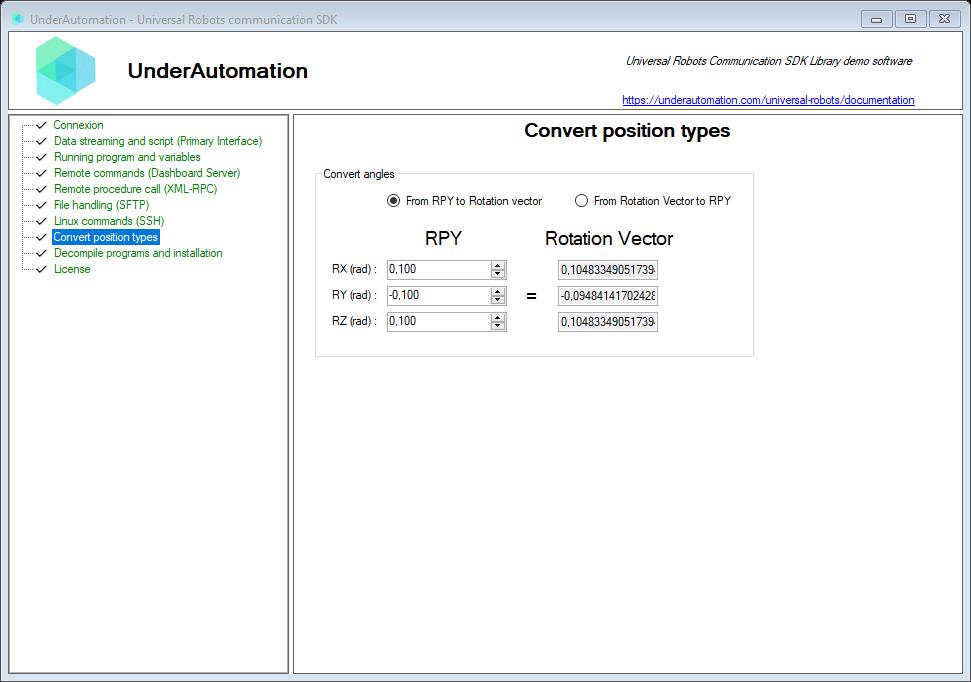
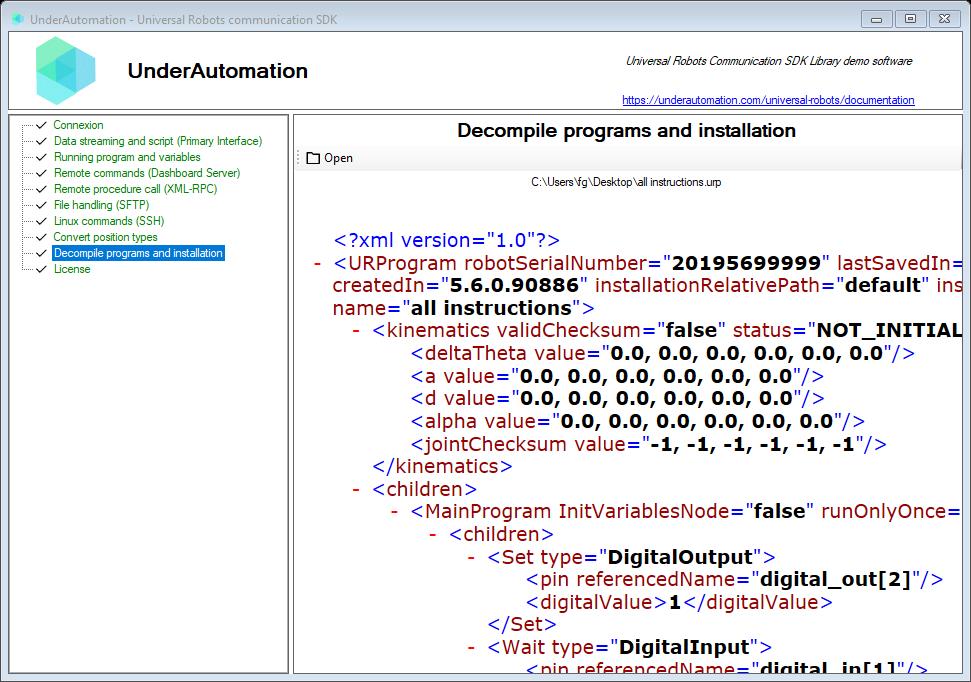
Example of a Windows application
Allows you to test all the features of the SDK with a simple interface.
The example is compiled in "self contained" and "single file" with .NET 8. The application is portable without installation.
Direct download
Contains the UnderAutomation.UniversalRobots.dll DLL in AnyCPU version for all versions of the .NET Framework, as well as for .NET Core and .NET 5.
Console example
Examples compiled with .NET Core that allow you to test some of the SDK's functions on Windows, Linux and MacOS.
By downloading, you agree to the terms and conditions : See terms and conditions
Windows x64 (65 MB)Windows x86 (60 MB)Linux x64 (64 MB)Linux ARM (62 MB)MacOS x64 (64 MB)MacOS ARM64 (71 MB)
Windows x64 (65 MB)Windows x86 (60 MB)Linux x64 (64 MB)Linux ARM (62 MB)MacOS x64 (64 MB)MacOS ARM64 (71 MB)
Python example
Example of how this SDK works with Python to retrieve the cartesian position of a robot.
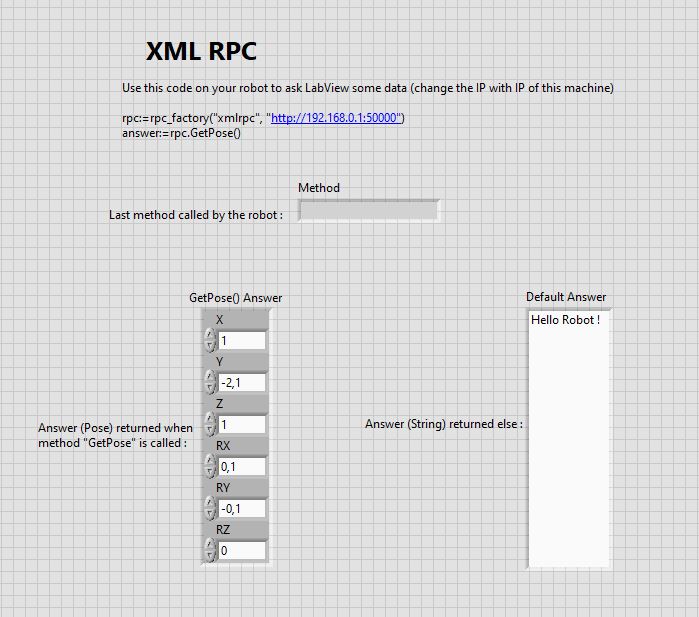
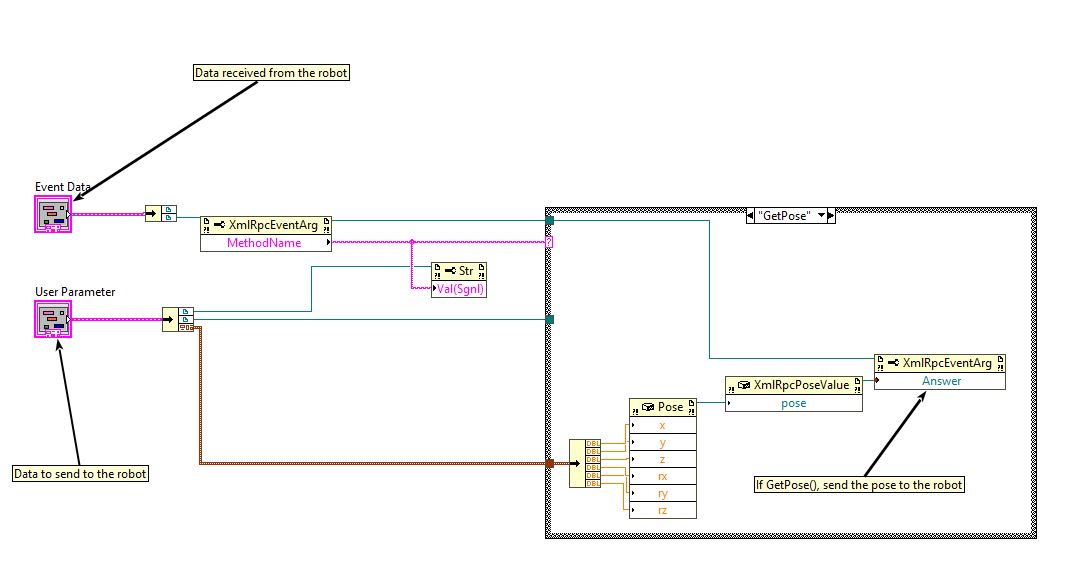
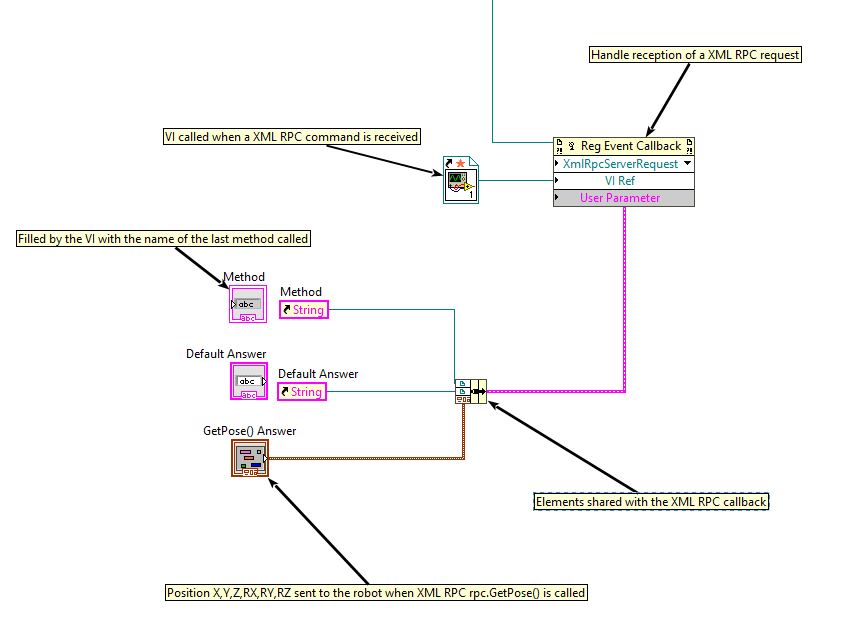
Example LabVIEW
Example of VI which allows to test most of the functions of this SDK.