Get started with .NET
On this page :
Code your application in C# or VB with this 100% managed library, without dependencies and available on NuGet.org in the version and architecture of your choice (x86, x64, ARM, Linux, Windows, MacOS, .NET Framework, .NET Core, UWP, ...)
This library has been developed and is compiled for all versions of .NET :
- .NET Framework : 3.5, 4.0, 4.5, 4.5.1, 4.5.2, 4.6, 4.6.1, 4.6.2, 4.7, 4.7.1, 4.7.2, 4.8
- .NET Standard : 2.0, 2.1
- .NET Core : 2.0, 2.1, 2.2, 3.0
- .NET 5.0, 6.0, 8.0, 9.0
For use with Mono or Universal Windows Plateform (UWP), use .NET Standard 2.1.
For use with the 3D Unity engine, you can use any .NET Framework or Standard version.
For each of these .NET versions, the assembly file UnderAutomation.UniversalRobots.dll is provided compiled in AnyCPU.
Recent .NET implementations (Core, 5.0, ...) allow cross-platform development on Windows, Linux and MacOS in various processor architectures (x64, x86, ARM, ARM64)
Download from Nuget
We recommend that you use the Nuget package manager to use this library. The appropriate version of .NET will be automatically chosen and you can easily update the library in the future.
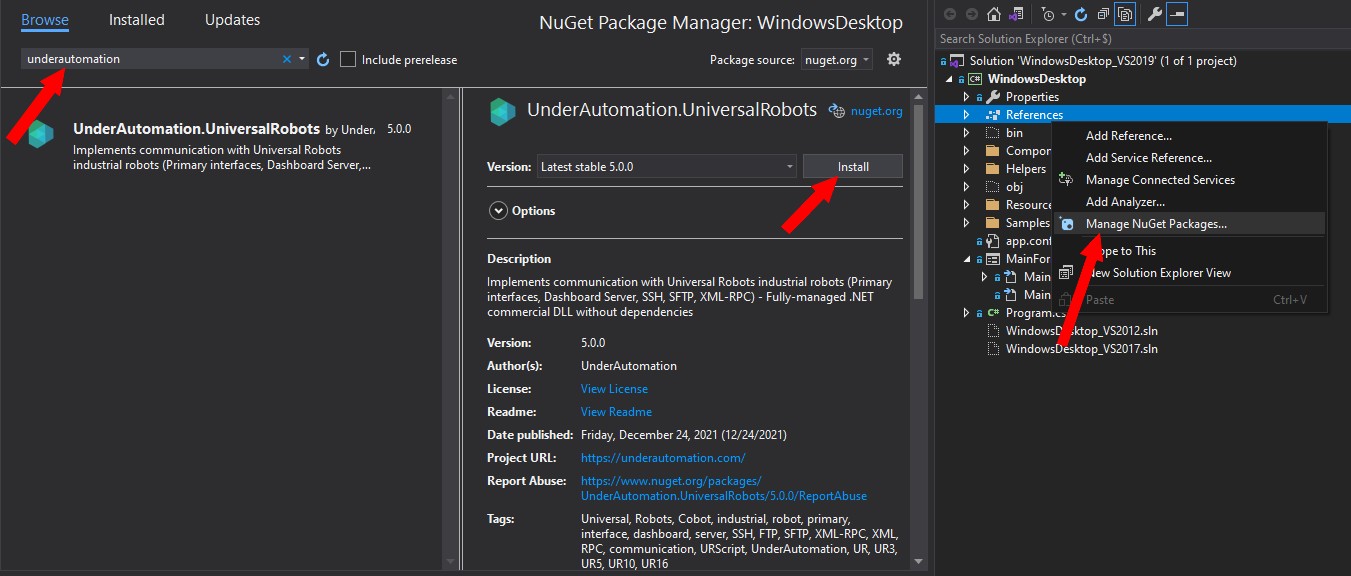
In Visual Studio, right click on the References node of your project and select Manage NuGet Packages....
Search for UnderAutomation and install the latest version of the package. After accepting the terms of use, the package will be downloaded and added as a reference to your project. You can then start developing!
See on NuGet.org : https://www.nuget.org/packages/UnderAutomation.UniversalRobots

Direct download
You can also directly download the file UnderAutomation.UniversalRobots.dll, you can then reference this assembly in your project.
Go to the download page to get these files and the compiled examples.
You can also checkout the sources of these examples on GitHub.
Start developing
You can now start writing your application in C#, F# or VB.NET.
Take a look at the following chapters to learn about the various features.
You just have to import the namespace UnderAutomation.UniversalRobots
using UnderAutomation.UniversalRobots;class MyCoolApp{static void Main(string[] args){var ur = new UR();ur.Connect("192.168.0.1");/// ... It's your turn to play :)}}