Configure the UR simulator (URSIM)
After downloading the SDK, it is possible to test it on a real robot or via the simulator. This article shows how to setup the simulator.
There are two main versions of the Universal Robots simulation software: Polyscope (the classic version running on a Virtual Machine) and PolyscopeX (the new web-based version running on Docker). Choose the one that fits your needs.
Polyscope (VM based)
This is the standard simulator for e-Series and CB-Series robots. It runs inside a Virtual Machine using VirtualBox.
Step-by-Step Installation
-
Download VirtualBox Download the latest version of VirtualBox from the official website: https://www.virtualbox.org/wiki/Downloads
-
Install VirtualBox Run the installer. Important: Ensure you check all network features during installation (specifically "Host-Only Networking").
-
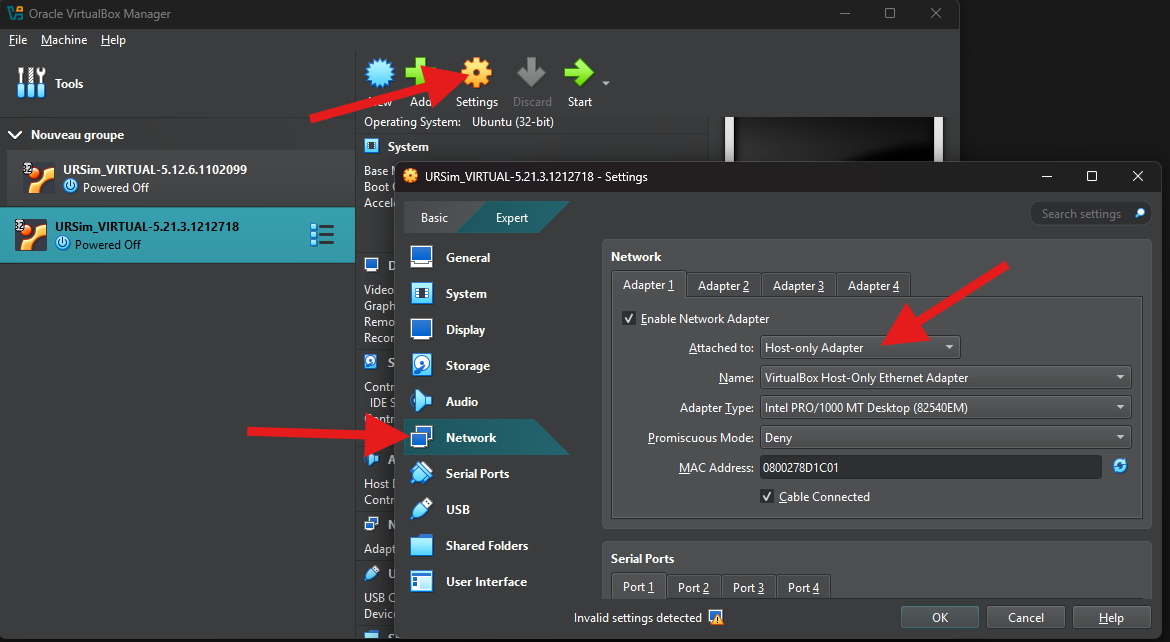
Configure Network Adapter Before starting the Virtual Machine (VM), go to the VM settings:
- Select Network.
- Attached to: Host-Only Adapter.
- Name: Select the default VirtualBox Host-Only Ethernet Adapter.
-
Launch the Simulator Start the VM. Once the Linux desktop appears, you will find several shortcuts for different robot arm models (UR3, UR5, UR10, etc.). Double-click one to launch Polyscope.
-
Find IP Address Once Polyscope is running, click the Hamburger Menu (top right corner) to see the IP address of the simulated robot. You will use this IP to connect your SDK.
PolyscopeX (Docker based)
This is the new generation of software, running a web-based interface. The simulation is lightweight and runs in a Docker container instead of a full VM.
Step-by-Step Installation
-
Download Docker Desktop Download and install Docker Desktop: https://www.docker.com/products/docker-desktop/
-
Start Docker Launch Docker Desktop and wait for the engine to start.
-
Run the Simulator Open a terminal (Command Prompt or PowerShell) and run the following command found in the official documentation:
docker run --rm -it -p 80:80 -p 30001:30001 -p 30004:30004 --add-host "host.docker.internal:host-gateway" --env HOST_ARCH=amd64 --network bridge --privileged universalrobots/ursim_polyscopex:latestWhat does this command do?
-p 80:80: Exposes the web interface on port 80 (access viahttp://localhost). If port 80 is already in use, try-p 8080:80and access viahttp://localhost:8080.-p 30001:30001: Exposes the Primary Interface (used for real-time control).-p 30004:30004: Exposes the RTDE interface (Real-Time Data Exchange).--privileged: Gives the container necessary permissions to run the simulation.
-
Access PolyscopeX Open your web browser and go to http://localhost (or
http://localhost:8080if you changed the port). You will see the new PolyscopeX interface. -
Connect with SDK You can now use the SDK to connect to the robot locally using IP address
127.0.0.1.