Universal Robots SDK documentation
Open and edit program and installation files
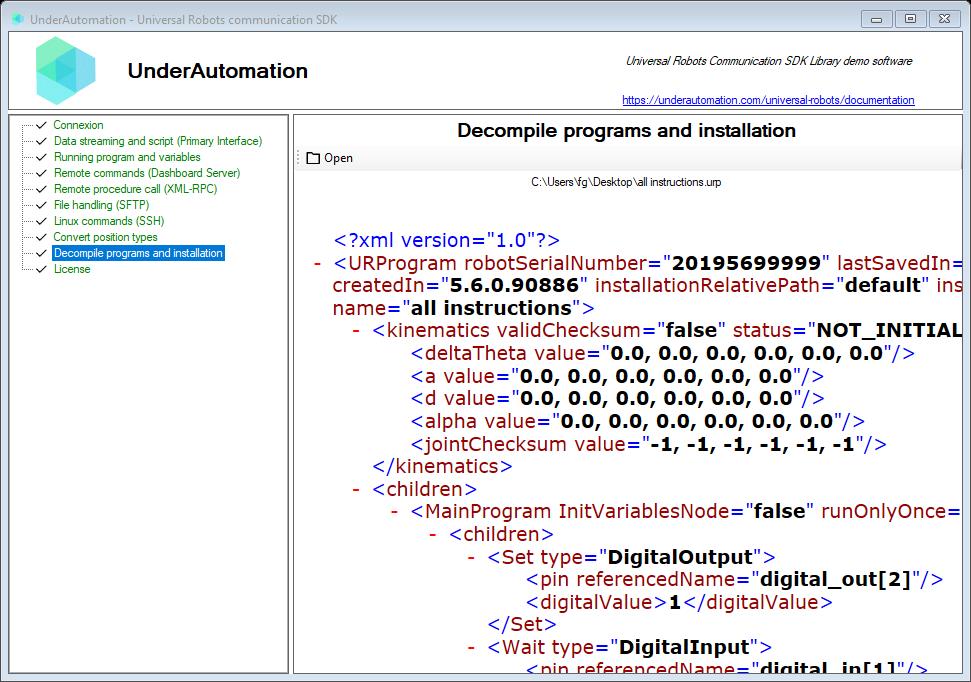
Decompile UR files like URP program and installation files
Edit program files
The library can open and edit program files with .urp extension. You can access and modify inner XML.
using System.Xml.Linq;using UnderAutomation.UniversalRobots.Files;class FileProgram{static void Main(string[] args){/**/URProgram prg = URProgram.Load(@"C:\myPrg.urp");XElement innerXml = prg.XML;// Set program associated installation file// You can also add instructions or change other attributesinnerXml.Attribute("installationRelativePath").Value = "default";// Save modified program files// You could then transfer this file to the robot with SFTPprg.Save(@"C:\myPrg.urp");/**/}}
Edit installation files
The library can open and edit installation files with .installation extension.
using System.Xml.Linq;using UnderAutomation.UniversalRobots.Files;class FileInstallation{static void Main(string[] args){/**/URInstallation prg = URInstallation.Load(@"C:\default.installation");XElement innerXml = prg.XML;// Change your installation settingsinnerXml.Attribute("showSpeedSliderOnRunTab").Value = "true";// Save modified program files// You could then transfer this file to the robot with SFTPprg.Save(@"C:\default.installation");/**/}}
Try it with the Windows example
API Reference
Members of Files.URArchive :public abstract class URArchive {protected URArchive(XElement xml)protected abstract string Extension { get; }// File name that should be used on a UR robotpublic string FileName { get; }// Load a UR archive from stream and decode it as XMLpublic static XElement Load(Stream fileStream)// Load a UR archive from file path and decode it as XMLpublic static XElement Load(string filePath)public string Name { get; set; }protected abstract string NameAttribute { get; }protected abstract string RootElement { get; }// Save encoded file to a streampublic void Save(Stream stream)// Save encoded file to a directory, overwrite it if it existspublic string Save(string directory)// XML description of the objectpublic XElement XML { get; }}
public class URProgram : URArchive {// Create a URProgram from its XML definitionpublic URProgram(XElement xml)public const string EXTENSION = ".urp"protected override string Extension { get; }// Load a program from streampublic static URProgram Load(Stream urpStream)// Load a *.urp program from file pathpublic static URProgram Load(string urpFile)protected override string NameAttribute { get; }protected override string RootElement { get; }}
public class URInstallation : URArchive {// Create a URProgram from its XML definitionpublic URInstallation(XElement xml)public const string EXTENSION = ".installation"protected override string Extension { get; }// Load an installation file from streampublic static URInstallation Load(Stream urpStream)// Load a *.installation file from pathpublic static URInstallation Load(string urpFile)protected override string NameAttribute { get; }protected override string RootElement { get; }}